

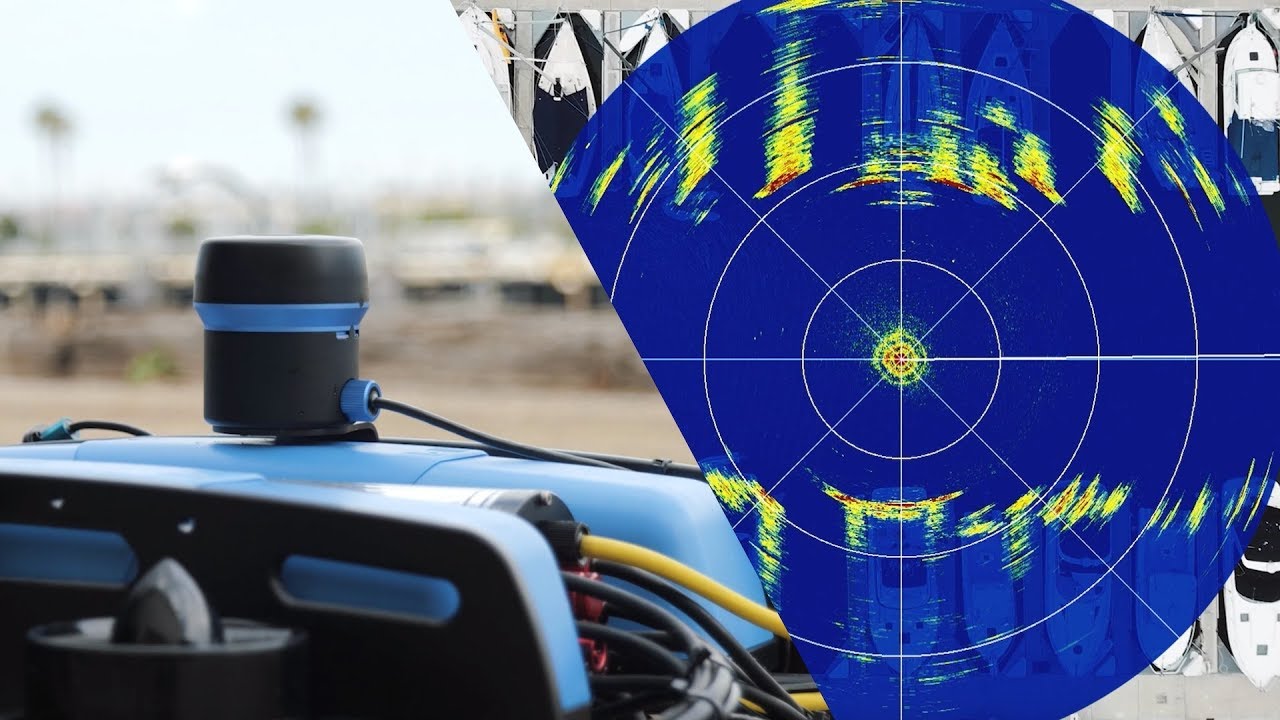
Ping360は、視界の悪い水中でもスムーズなナビゲーションを可能にする革新的なツールです。このツールは、水中に信号を送り、反射したエコーを検知し、その振動を微調整することで対象物の画像を生成します。この技術は、気象レーダーなどでも使用されています。
特徴
- 確認できるエリアは周囲50メートルで、水深は300メートルまで対応しています。
- ロープ、壁、桟橋、岩、難破船、ボート、魚など、あらゆる構造物や物体からの音波反射を確認できます。
- 水の透明度に関係なく、航行に重要な基準点を得ることができます。
- 水中の重要な特徴を素早く発見できます。
ROVにPing360を搭載することで、周囲を360度全方向から観察し、水中の障害物や特徴を正確に把握することができます。水中での探査や航行において、重要な情報を提供し、作業の効率性を向上させます。
弊社で使用した感想
評価:
障害物の有無や方向など視界が悪い場所でBlueROV2を運用する場合の目安になりました。
Ping360スキャニングイメージングソナー







内部構造: Ping360の仕組みと特徴
Ping360は、水中でのナビゲーションを向上させるために設計されたソナーシステムです。以下にその内部構造と特徴を紹介します。
ケース構造
オイル充填部を上部に配置し、空気充填部を下部に配置しています。
アルマイト製のケースが使用されており、堅牢な保護を提供します。
1メートルの貫通部が取り付けられたケーブルが付属し、最大水深は300メートルです。
取り付けと互換性
底面には4つのM3取り付け穴があり、BlueROV2や他の機器に簡単に取り付けることができます。
付属のブラケットを使用することで、取り付けがスムーズに行えます。
仕様と通信
ソナーは、音響周波数750kHzで動作します。
水平方向には2度、垂直方向には25度のビーム幅を持ちます。
電圧は11〜25Vに対応しており、USB、RS485、イーサネットを介して通信することができます。
利便性と付属品
BlueROV2に必要なすべてのものが付属しており、すぐに利用することができます。
以下の動画は、水中ドローンBlueROV2に取り付けたPing360スキャニングイメージングソナーの紹介です。水中作業中に、水の濁りや映像の限界により、対象物の検出や方向把握が困難な場合があります。Ping360を使用することで、対象物を可視化し、効果的なナビゲーションを実現できます。
[動画リンク] (ここに動画のリンクを挿入してください)
Ping360スキャニングイメージングソナーのスペック
| パラメータ | 値 | |
| 最大供給電圧 | 25ボルト | |
| 最小供給電圧 | 11ボルト | |
| 最大消費電力 | 5 W | |
| 信号プロトコル | USB、イーサネット、RS485 | |
| 電源線 | 黒 | Ground |
| 赤 | Vin | |
| オレンジホワイト | Vsense | |
| 緑-白 | D- | |
| 緑 | D + | |
| オレンジ | GND | |
| オレンジホワイト | TX+ | |
| 緑-白 | RX+ | |
| 緑 | RX- | |
| オレンジ | TX- | |
| オレンジホワイト | Not Used | |
| 緑-白 | D- | |
| 緑 | D+ | |
| オレンジ | GND | |
| 音響 | ||
| 周波数 | 750 kHz | |
| ビーム幅-水平 | 2° | |
| ビーム幅-垂直 | 25° | |
| ビーム幅-垂直 | 0.75メートル | |
| 最大範囲 | 50メートル | |
| 範囲分解能 | 範囲の0.08% | |
| 50mでの範囲分解能 | 4.1cm | |
| 2mでの範囲分解能 | 1.6mm | |
| 機械的解像度 | 0.9° | |
| スキャンされたセクター | 360°まで可変 | |
| 2mでのスキャン速度 | 9秒/ 360°* | |
| 50mでのスキャン速度 | 35秒/ 360°* | |
| 商品 | ||
| 圧力定格 | 300メートル | |
| 温度範囲 | 0-30°C | |
| 空気中の重量(ケーブル付き) | 510 g | |
| 水中重量(ケーブル付き) | 175 g | |
| ソナー取り付けネジのサイズ | M3x0.5 x 5 mm | |
| 取り付けブラケットのネジサイズ | M5x0.8 x 12 mm | |
*これらの値は、ソフトウェアの最適化によって改善されると予測されています。

https://www.rov-fun.com/wp/manual/understanding-and-using-scanning-sonars/
www.rov-fun.com
Ping1Dソナー 高度計&音響測深機



BlueRoboticsのPingソナー: 多目的なシングルビームエコーサウンダー
エコーサウンダーとは
- エコーサウンダーは、水中ソナーの中で最もシンプルなタイプであり、音響測深機とも呼ばれます。
- 電振動子を使用して超音波パルスを水中に送信し、反射して戻ってくるまでの時間を測定することにより、水深や距離を測定します。
- 得られたデータを利用して対象物の断面を自動的に記録します。
Pingソナーの用途
- ROVやAUVの高度計として使用できます。
- USVでの水深測定作業にも適しています。
- 障害物回避ソナーや水中での距離測定にも利用可能です。
測定範囲とビーム幅
- R測定範囲は50mです。
- R測定ビーム幅は30度です。
- R周波数115kHzのトランスデューサーを使用し、ボートなどで使用されるエコーサウンダーとの干渉を避けています。
- Rこのため、船上の揺れや障害物回避のアプリケーションに最適です。
高度なボトムトラッキングアルゴリズム
- Pingソナーには、高度なボトムトラッキングアルゴリズムが搭載されており、複数のエコーが混在する複雑な状況でも海底までの距離を正確に測定することができます。
Pingソナーは、その多機能性と正確な距離測定能力により、さまざまな水中アプリケーションで活用されています。
Ping1Dソナー 高度計&音響測深機のスペック
| パラメータ | 値 |
| 電気的特性 | |
| 最大電源電圧 | 5.5ボルト |
| 最低電源電圧 | 4.5ボルト |
| TTL電圧レベル | 3.3 ~ 5ボルト |
| 標準的な消費電流 | 100ミリアンペア |
| 通信方式 | |
| 信号プロトコル | TTLシリアル(UART) |
| 使用可能なファームウェア ボーレート | 115200bps(デフォルト)、9600bps |
| メッセージプロトコル | Pingプロトコル |
| メッセージサブセット共通 | ping1d |
| コードライブラリ実装 | Python、C++、Arduino |
| ケーブル | |
| ケーブル長 | 830 mm |
| 導体サイズ | 24AWG |
| 電線 | 黒-接地 赤-Vin 白-デバイス受信 緑-デバイスの受信機 |
| 音響 | |
| 周波数 | 115kHz |
| ビーム幅 | 30度 |
| 最小レンジ | 0.5m |
| 標準的な使用可能範囲 | 50m |
| 絶対最大距離(ファームウェアの制限) | 70m |
| レンジ分解能 | レンジの0.5 |
| レンジ分解能(50m時) | 25 cm |
| レンジ分解能 | 2m時 1cm |
| 物理的 | |
| 定格圧力 | 300m |
| 温度範囲 | 0-30°C |
| 空気中重量(ケーブル含む) | 133g |
| 水中重量(ケーブル含む) | 55g |





