

ニュートングリッパーは、BlueROV2やその他の海底ロボットに、物体を回収したり、引っ掛かったテザーを解消することができます。この商品には水中ドローンBlueROV2への取り付けに必要なものがすべて含まれています。
ニュートングリッパーは直径6.2cmまでの物を掴めます


ニュートン海底グリッパーとは
ニュートン海底グリッパーは、BlueROV2などの海底ロボット用の単機能マニピュレーターです。
性能と特徴:物体をつかむ能力と深度範囲
グリッパーは、直径6.2cmまでの物体をつかめます。本体は空気で満たされ、Oリングで密閉されており、水深300mまでの定格となっています。
モーターと制御:ブラシモーター・コントローラーの利用
内部のモーターは、ブラシ付きモーターとリードスクリューを使用したリニアアクチュエータを駆動に採用し、専用のブラシモーター・コントローラーで制御されます。標準的なサーボスタイルのPWM信号に対応しているので、スラスターやライトと同じようにグリッパーを制御することができます。
電源と安全性:電流消費量と自動停止機能
グリッパーは9~18vの入力に対応し、最大6Aの電流を消費します。電源はスラスターと同じバッテリーで供給できます。また、モーターのストール状態を自動的に検知してモーターを停止させるので、グリッパーは常に適切なタイミングで停止することができます。
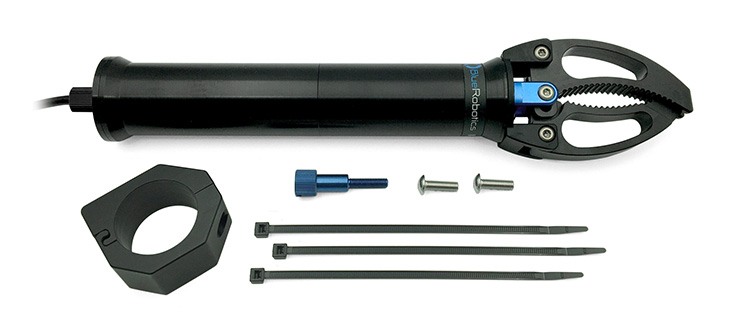
付属品と取り付け:全て揃ったセットとその取り扱い
グリッパーには、BlueROV2で使用するために必要なものがすべて付属しています。陽極酸化アルミニウム製マウントは、蝶ねじを使用してフィールドで素早く引き込みと回転を行います。マウントは、付属のM5ネジ2本で取り付けられます。
スペック
| 電力スペック | ||
|---|---|---|
| 電源電圧 | 9~18V | |
| PWMロジック電圧 | 3.3V | |
| PWMニュートラル信号 | 1500マイクロ秒 | |
| PWMオープン信号 | 1530マイクロ秒~1900マイクロ秒 | |
| PWMクローズ信号 | 1470マイクロ秒~1100マイクロ秒 | |
| ピーク電流 | 6A | |
| メカニカルスペック | ||
| グリップ力(先端) | 97ニュートン | |
| グリップ力(中央) | 124ニュートン | |
| リニアピストントラベル | 15㎜ | |
| ジョー開口 | 70㎜ | |
| 開閉時間 | 1.6秒 | |
| ケーブルスペック | ||
| ケーブル径 | 3.8㎜ | |
| ケーブル長 | 635㎜ | |
| ケーブルジャケット | ブラックウレタン | |
| 導体の絶縁 | 酸エッチングFEP | |
| 導体ケージ | 20AWG | |
| ワイヤー | 黒:アース / 赤:電源 / 黄:シグナル | |
| 物理的スペック | ||
| ハウジング材質 | アルミ6061-T6 | |
| 定格圧力 | 300m | |
| 全長(クローズ時) | 294㎜ | |
| 全長(オープン時) | 300㎜ | |
| 本体基礎円筒部径 | 35㎜ | |
| ブラケット取付穴の間隔 | 16㎜ | |
| ブラケットネジサイズ | M5×0.4 | |
| 重量(空気中,ケーブル付) | 616g | |
| 重量(水中,ケーブル付) | 260g | |
注意!グリッパーの安全な操作方法
身体への危険性:グリッパーへの接触を避ける
グリッパーの操作中は、指や体の一部を近づけないようにしてください。その強力さから、怪我を引き起こす可能性があります。この情報を他のクルーメンバーとも共有してください。
過熱問題:モーターの連続使用制限とクールダウン時間
グリッパーを1分以上連続で高速回転させると、モーターが過熱し、ローターフレームが溶けてしまう恐れがあります。1分以上の開閉サイクルを避け、高速サイクルの間には適切なクールダウン時間を設けてください。
関連動画






