

今回は、BlueBoatとローランス社のソナーを使って地図を作る方法について解説します。
ローランスエリートFS7は、3つの異なるソナーモードを持つトランスデューサ(変換器)を搭載しています。このシステムを利用することで、手間をかけずに正確な深度データを収集できます。
ただし、リアルタイムで深度データを確認するには、追加のハードウェアが必要です。他メーカーの類似製品と違い、ローランス社のシステムはデータのエクスポートが簡単にできる点が特徴です。
BlueBoatにこのシステムを組み込むためには、取り付けボルトとウェットリンクペネトレーターが1つ必要です。
なお、チャートプロッターは水没に対応していないため、このシステムは水上での使用に限定される点にご注意ください。
ハードウェアインストール
必要なパーツとツール

BlueBoat 非スクリュー式水上船舶

BlueBoatペイロードブラケット
下記のパーツも必要です。
- LowranceエリートFS7とアクティブイメージング3-in-1トランスデューサ
- 2x M5 by 50mm または ¼"-20 by 2" (ディスプレイの取り付けに使用)
- 6x M5または1/4″ワッシャー
- 2x M5または¼"-20ナイロンロックナット
- #2 プラスドライバー
- ナット用の適切なアジャスタブルレンチまたはソケットツール
- 直径5.5mmまたは1/4″のドリルビット付きドリル
- ナット用の適切なアジャスタブルレンチまたはソケットツール
- ペネトレーターレンチ
- MicroSDカード(容量64~128Gb)
- ケーブル管理用のジップタイ
※ステンレススチール製の金具が望ましいです
多機能ディスプレイの取り付け
- ビット付きドリル
- #2 プラスドライバー
- ナット用の適切なアジャスタブル・レンチまたはソケット・ツール
- 2x M5 by 50mmまたは¼"-20 by 2"
- 4x M5または1/4″ワッシャー
- 2x M5または¼"-20ナイロンロックナット
- 5.5mm LCウェットリンクペネトレーター
- ローランスディスプレイ電源ケーブル
まず、ディスプレイユニットをリアクロスバーのクロスチューブ上部に取り付けます。
本体とディスプレイを手前に向けて、プラスチック製ディスプレイマウントの左側の取り付け穴を、ロッキングハンドルの右側にある8番目の穴に合わせましょう。

この位置調整により、ボートの中心線から少し右側にユニットを固定し、左側にあるトランスデューサーの重量をバランスさせます。
まず、左側の取り付け穴をM5×50mmまたは1/4"-20×2″のボルトで固定します。その後、ディスプレイをブラケットから取り外し、クロスバーとプラスチックマウントに適切なサイズの穴を開けてください。
両端のボルトヘッドやナットとクランプ面の間にはワッシャーを挿入し、同じサイズの2本目のボルトでディスプレイをしっかりと固定します。
次に、赤いディスプレイコネクターと反対側にあるケーブル(約300mm/12″)の外側のジャケットを剥がします。
ディスプレイのコネクターから、左舷側のペネトレーターまでの距離を確認し、十分なケーブルの長さがあることを確認してください。必要に応じてケーブルを短く切り、その後に導線を剥きますが、船体までの距離に見合った長さであることを必ず確認してください。
最後に、赤と黒の導線を5.5mmのLCウェットリンクペネトレーターに通して固定します。詳しい手順については、ウェットリンク組立ガイドをご参照ください。
トランスデューサーの取り付け
必要な材料
- 2x M5 x 25mm または #10 x 1インチ
- 2x M5または1/4″ワッシャー
- 2x M5または#10ナイロンロックナット
- 2x BlueBoatハルマウントブッシュ(ペイロードブラケットに付属)
- 90度ブラケットに取り付けたローランス 3-in-1トランスデューサー
- #2プラスドライバー
- ナット用の適切なアジャスタブルレンチまたはソケットツール
- ケーブル管理用のジップタイ
まず、付属の金具を使ってトランスデューサーをマウントブラケットに取り付けます。
次に、船体の取り付け穴(喫水線より下)にトランスデューサーを固定してください。
ブラケットは、船体の最も前方にあるキールの真下にトランスデューサがくるように置きます。
90度ブラケットに付属しているボルトはそれぞれ、下の写真のように、船体マウントブッシング、船体、ブラケット、最後に外面にある金属ワッシャーとナイロンロックナットを貫通させてください。
まず1本のボルトを完全に締め、2本目のボルトを締めるときに角度を適切な位置に保持し、トランスデューサーをデッキ面と水平になるように固定します。
トランスデューサー取り付け後、ボートの重量がトランスデューサーの上にかからないよう注意してください。

トランスデューサーの向きは、ケーブルがユニットの船首側に出るようにしましょう。
トランスデューサーのケーブルはしっかりと巻いておき、船尾からディスプレイまでのわずかな距離を通すのに十分な長さだけ空けておきます。
ジップタイやベルクロクロスチューブストラップを使って、ディスプレイマウントとクロスバーの両方に巻きつけて固定してください。
ディスプレイの背面に向かって右側にある黒いコネクターにケーブルを差し込み、指で締めたロックナットで固定します。

| 1.電源コネクタ |
| 2.ベルクロストラップ&トランスデューサーケーブル |
| 3.トランスデューサーコネクタ |
| 4.トランスデューサー |
| 5.電源接続用のWLP |
電源への接続
必要な材料
- #2 プラスドライバー
- 90度ブラケットに取り付けたローランス3-in-1トランスデューサー
- ペネトレーターレンチ
- ケーブル管理用結束バンド
- MicroSDカード
ローランスシステムは、BlueBoatとテレメトリーシステムの両方から完全に独立して動作します。
したがって、BlueBoatからローランスに電源を接続するだけで問題ありません。
どちらの船体にもヒューズボードに電源接続ポイントがありますが、システムの接続には左舷船体の使用をおすすめします。
理由は、右舷側にはナビゲーターとIMU電子機器が搭載されているからです。
左舷船体のブランキングペネトレーターボルトを取り外し、電源ケーブルを取り付けたウェットリンクペネトレーターと交換します。
その後、ペネトレーターレンチでしっかりと締めます。

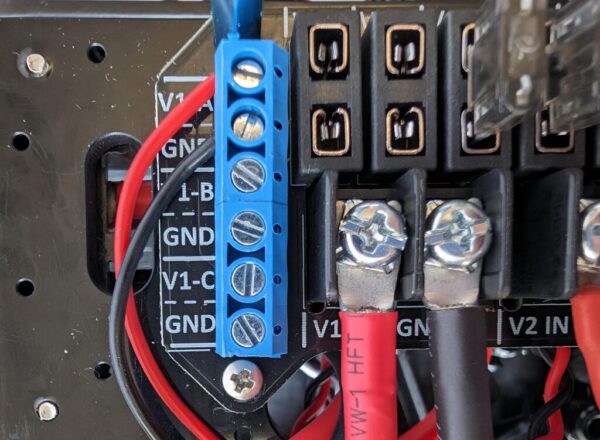
付属の2Aヒューズを使用して、ヒューズボードで赤と黒のワイヤーを接続しましょう。
V1と書かれた端子はバッテリー電圧を供給し、V2と書かれた端子はDC5Vを供給します。
接続が完了したら、ハッチのふたのクラムシェルを取り付けて、船体を閉じる前にケーブルを配線し、ふたの中でワイヤーを固定してください。
最後に電源ケーブルをディスプレイ背面左側の赤いコネクターに差し込みめば完了です。
※ディスプレイの真ん中の2つのコネクターは、パッケージに含まれていた黄色と黒のゴムキャップで覆われているはずです。
ローランスのテスト
電源とトランスデューサーの接続が完了したら、BlueBoatの電源を入れます。
電源を入れるたびに、本機の使用条件を確認しましょう。
ボートの主電源スイッチをオンにしたら、画面が点灯してユニットが起動するまで、右下にあるディスプレイの電源ボタンを押したままにしてください。
セットアップの詳細については、ローランスのマニュアルを参照してください。
大容量のソナーデータセット(1時間あたり約2~4GB)に十分なストレージを確保するため、SDカードを取り付けます。
※SDカードスロットは、ディスプレイの左下にあるゴムのロゴのLOWの後ろに隠されていますので、忘れずに取り付けてください。
現場での使用
ユニットを起動するときは、ディスプレイに水しぶきをかける程度で、絶対に水につけないようにしてください。
また、必ずトランスデューサーを保護する方法でユニットを運搬してください。
トランスデューサが何かに接触しないように設置しましょう。
※データ品質の問題やローランスのハードウェアへのリスクを考慮し、白波のある荒海でこの構成でBlueBoatを操作することはおすすめしません。
フィールドで展開する準備ができたら、通常のセットアップと接続プロセスに従ってください。
車両を航行させる前に、手動でローランスの電源を入れ、各ソナーをアクティブにする必要があります。
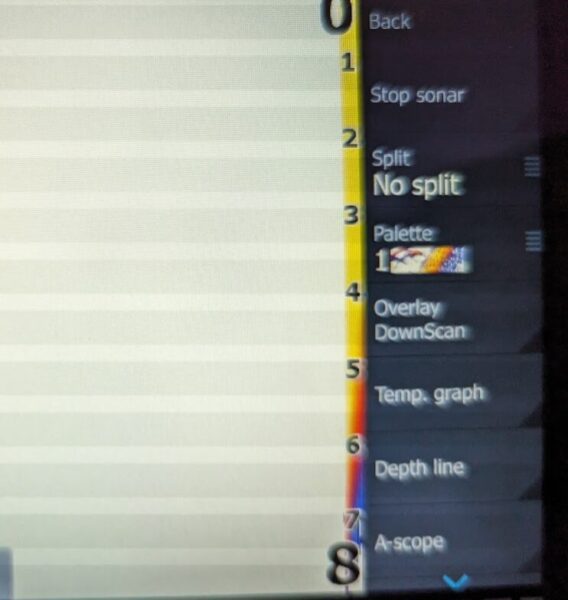
まず起動時の警告に同意したら、右上のページボタンを押し、ソナー、サイドスキャン、ダウンスキャンのいずれかを選択してください。
順番は重要ではなく、それぞれをチェックし、まだアクティブでなければオンにしましょう。

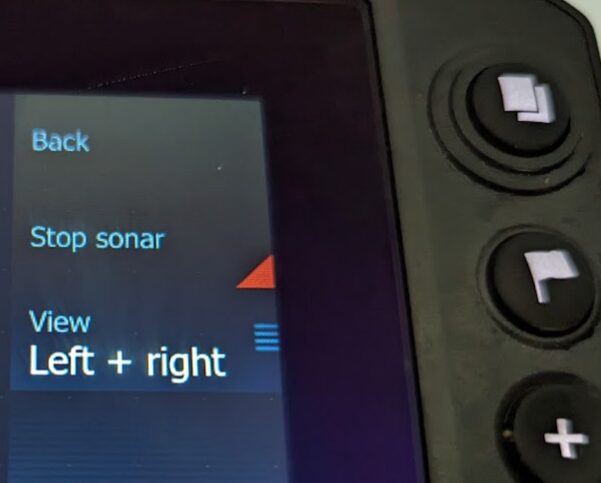
右側の「More options(その他のオプション)」を選択し「Stop sonar(ソナー停止)」ボタンをタッチして、赤い三角形が消えるようにしてください。
この時点で、いくつかのデータがウォーターフォールグラフに表示され始めるかもしれません。

このプロセスは、メインページでアクセスする各ソナーで繰り返されます。
しかし、ソナーとダウンスキャンは一緒にオンとオフになるので、片方だけの切り替えが必要です。
続行する前に、両方がデータを収集していることを確認しておきましょう。
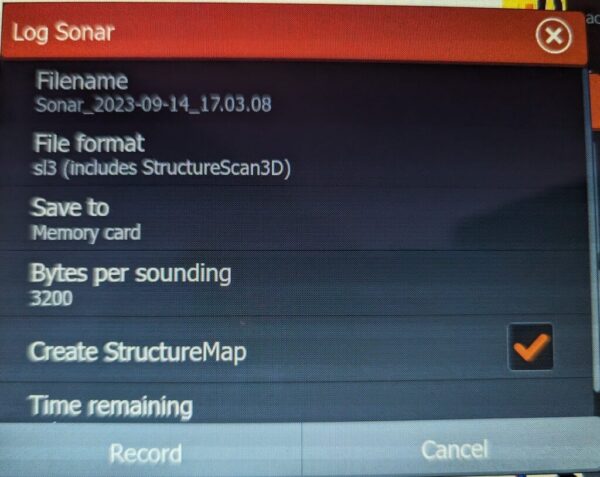
ソナーがアクティブになったら、電源ボタンを押して「System Controlsメニュー」にアクセスしましょう。
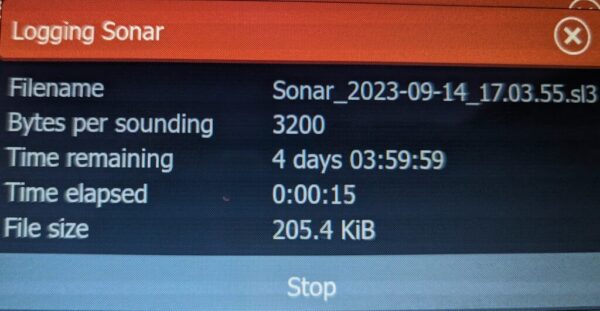
そこで「 Log Sonar」を選び「Record」を選択してデータ収集を開始してください。

電源ボタンを短く何度も押してディスプレイの輝度を最小にし、カバーをディスプレイの上に置きます。
これにより、操作の重要な側面の電力を節約し、ディスプレイの過熱を防ぐことが可能です。
これで、BlueBoatが進水地点から離れ、計画した調査を実施することができます。
調査計画操作の詳細については、BlueBoat オペレーターズガイドのミッションプランニングセクションを参照してください。
Lowrance FS7は、すべてのソナーがアクティブな状態で約10ワットの電力を消費しますので、バッテリー寿命に劇的な影響を与えることはありません。
データ収集の停止
ミッションが完了したら、車両を最適な回収場所までナビゲートしてください。
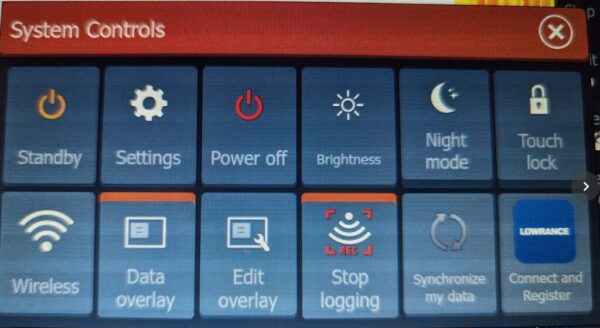
車両を復元し、ローランスの電源ボタンを1回押してシステムコントロールメニューを表示します。
その後「Stop logging」アイコンを選択し「Stop」を選択してソナー記録の停止が可能です。
その後、主電源スイッチでブルーボートの電源を切ることができます。
終了後、ローランスシステムを真水で洗い流すことを忘れないでください。
データの使用
ソナーログデータは、SDカードを取り出し、ファイルをコンピューターに直接コピーするのが最も簡単なアクセス方法です。
WiFi接続でローランスへアクセスもできますが、不安定になりがちで、Internet Explorerを必要とし、速度も遅くなるので、ここでは詳しく説明しません。
データを入手したら、.sl3ファイルをC-Map Genesisにアップロードしましょう。
このサービスには、データを公開する無料オプションがあります。
データを非公開にし、植生や底硬度マップレイヤーを生成したい場合は、年額100ドルまたは月額25ドルのプレミアムアカウントを選択してください。
アカウントを作成した後、ウェブアップロードオプションを選択し、.sl3ファイルをアップロードします。
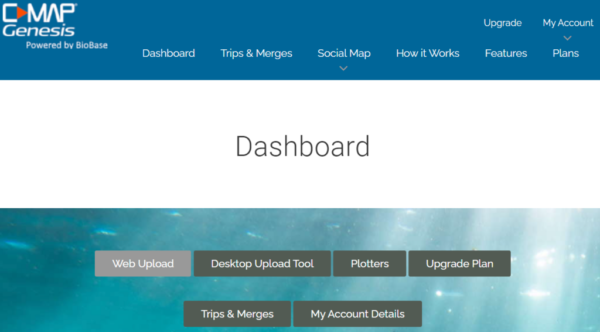
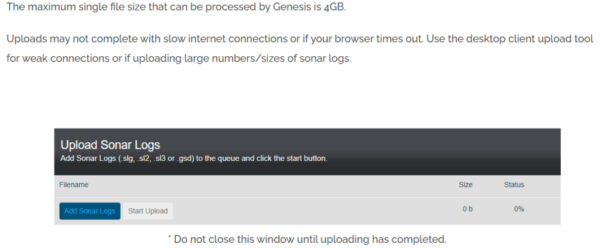
「Trips & Merges(トリップ&マージ)」ページは、あなたのデータを処理するために深く潜った後に「浮上」する場所です。
浮上するまでの間、データが処理中であることをページの右上に黄色で表示されます。
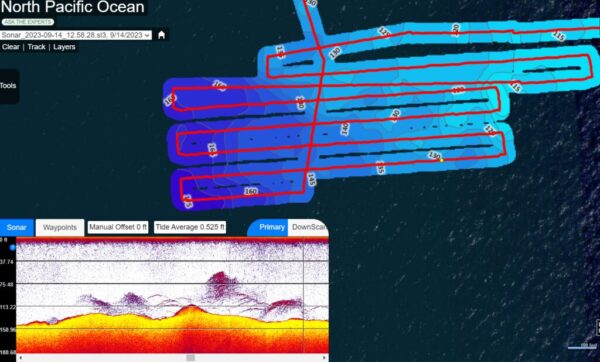
重複するエリアにわたる複数の調査ログファイルは、データが独立型マップに処理された後、"Genesis Merge "を介して結合できます。
個々のトリップを表示する場合、プライマリおよびダウンスキャンソナーの完全な波形が確認でき、相対的な位置が地図上に表示されます。


まとめ
今回は、一般的なハードウェアを使用したBlueBoatの測量の基本をカバーしています。
ただし、改善の余地はたくさんあるでしょう。
- ローランスの横にPing2を配置すれば、オペレーターの測量をガイドするリアルタイムのデータが得られます
- ボートの後ろにソナー・トランスデューサーを運ぶためにカスタム・トウフィッシュを使えば、質の高いデータを収集するための環境条件の許容範囲を広げることができます。
- 他のソナーシステムでは、優れた輸出や追加機能を提供するかもしれません。
本記事では、機械的および電気的観点から類似のソリューションをインストールするために有用であることが証明されたはずです。
同様のプロジェクトを実施される場合は、必ずフォーラムで結果を共有してください。
私たちは、ドキュメント、インストラクション、ソフトウェア、そしてユーザーエクスペリエンスをより良いものにするために常に努力しています。
本記事およびガイドをどのように改善できるか、何かアイデアがあれば、遠慮なくここでお知らせください。






を搭載しています。このシス){kind=link}