

操作マニュアル紹介
このページでは、遠隔制御型水中ロボット「BlueROV2」を操作する方法について説明します。
BlueROV2を操作するためには、まず本体を組み立て、必要なソフトウェアをセットアップする必要があります。
もしまだBlueROV2を組み立てていない場合は、組み立てマニュアルをご確認ください。
また、ソフトウェアのセットアップが完了していない場合は、ソフトウェアセットアップページをご覧ください。
安全について
リポバッテリーはエネルギー密度が高く、取り扱いに注意が必要です。正しい使用方法やメンテナンスを行うことで、安全性を確保できます。 リポバッテリーの使用方法やお手入れに関する詳細な情報は、以下のページをご確認ください。 リポバッテリー取り扱いの注意点 リポバッテリーを長持ちさせるためには、以下のポイントに注意してください。 例:10,000mAhのバッテリーの場合、10アンペア以下で充電するのが理想的です。 BlueROV2のバッテリーを安全に交換するために、以下の手順をお守りください。 BlueROV2を水中に入れる前に、以下の準備を行ってください。 制御された環境でのテストは、トラブルを未然に防ぐための重要なステップです。しっかり準備を整えて、安全に操作を開始しましょう。 初めてのダイビングの準備をする際は、まず充電済みのバッテリーを接続してください。 その際、接続方法は「バッテリー交換セクション」に記載されている手順と同じです。 トップサイドコントロールを設定するには、セットアップページに記載されている手順に従って進めてください。 BlueROV2で真空テストを行うには、キットに付属している真空ポンプを使用してください。 初めてBlueROV2を水中に入れる前に、このテストを行うことが非常に重要です。 また、ペネトレーターやOリングなどのシール部分を交換した場合も、シールが適切に機能していることを確認するために必ず真空テストを実施してください。 問題が発生した場合の対処法
このチェックリストは、通常のダイビング前チェックリストよりも徹底した内容で、以下の状況に該当する場合に実施してください。 以下の項目を確認し、ダイビング前にROVが安全に動作できる状態であることを確かめてください。 このチェックリストは、ROVを水中に入れる前に毎回実施する必要があります。 チェックリストは、バッテリーの接続、バッテリーエンクロージャーのエンドキャップの取り付け、およびバッテリーエンクロージャーのベントプラグの取り付けが完了した後に開始してください。 BlueROV2は多くのコンディションで起動することができますが、特別な注意が必要な場合もあります。 デフォルトのボタンレイアウトは以下の通りです。 ピッチとロールの調整は、Heavy Retrofit Kitを装備したBlueROV2でのみサポートされています。 BlueROV2のヘビーレトロフィットキットでは、ロール角とピッチ角を完全にコントロールできます。現在、ロールとピッチの入力には2つの方法があります。 これは、ピッチとロールを調整するためのデフォルトであり、推奨される方法です。ボタンを1回押すか、押し続けることで、希望の車両姿勢になるまで車両のピッチとロールを調整します。ダイブモードがMANUALモードに切り替わると、ロールとピッチの入力はクリアされますが、解除時にはクリアされません。 ロール&ピッチトグルボタンを押すと、左サムスティックの機能を、車両の前方および横方向の動きの制御と、車両のロールとピッチの制御の間で切り替えることができます。 デフォルトのボタンレイアウトが気に入らない場合、QGroundControlで変更することができます。 QGroundControlのドロップダウンに表示される一般的なボタン機能とその関連するボタン機能パラメータのリストです。 「サーボ#_max_momentary」や「サーボ#_min_momentary*」は、グリッパーが接続されている出力チャンネルに対応するサーボ番号に置き換えて使用します。さらに詳細なサーボ機能マッピングについては、サーボ機能マッピング表を参照することが推奨されます。 以下は、NavigatorフライトコントローラとPixhawk 1オートパイロットについて、**servo_#**ボタンがどの出力チャネルを制御するかを示す表です この表は、特にグリッパーなどのサーボ駆動装置に関連しており、各サーボの制御がどのチャネルに接続されているかを示しています。サーボ番号に対応する出力チャネルを確認することで、適切な操作が可能になります。 これらのモードは、ROVの操作を簡単にし、特定の操作を自動化して安定したダイビングをサポートします。 BlueROV2のダイビング中は、テザー(ROVと操縦者を繋ぐケーブル)の管理が非常に重要です。テザーがROVの性能や安全に与える影響を最小限に抑えるため、以下のガイドラインに従ってください。 これらのガイドラインを守ることで、ROVの安定した運用とテザーの長寿命を確保し、安全なダイビングを実現できます。 BlueROV2を安全に運転するために、以下のガイドラインを守ってください。 これらのガイドラインを守ることで、ROVの安定した運用と周囲の環境の保護を確保し、安全で効率的なダイビングを行うことができます。 バッテリーを長持ちさせ、ROVを安全に運用するためには、バッテリーの監視が重要です。 BlueROV2の回収時は、動力での回収が通常の方法です。 これらの手順を遵守することで BlueROV2の安全な回収とメンテナンスが可能となります。 潜水中にROVの電源が切れたり、QGroundControlとの接続が失われた場合、以下の方法で安全に回収を行ってください。 ダイビングの合間にROVを水面から出しておく場合、15分以上放置する場合は、必ず日陰で保管してください。 使用後のお手入れをすることで ROVの状態を良好に保ち 長期間の使用が可能になります。 このセクションでは、BlueROV2を維持するために必要な日常的な操作の手順をわかりやすく説明します。 バッテリーを外す際は 慎重に接続を外し、作業中に誤って電力が供給されないようにします。 電源ケーブルを直接引っ張らないようにし、ケーブルに負担がかからないようにしましょう。 電源ケーブルにアクセスできたら、以下の方法でROVの電源のオン・オフが行えます。 これでバッテリーカバーをしっかり閉じることができます。 BlueROV2にアクセサリを取り付けたり、保守作業を行ったりする際には、電子機器エンクロージャーを開ける必要がある場合があります。 必要なもの チューブを取り外すことで、BlueROV2内部の電子機器にアクセスできるようになります。 BlueROV2にアクセサリを取り付ける際には、通常、ペネトレータバルクヘッドを電子機器エンクロージャーのエンドキャップに取り付ける必要があります。 新しいペネトレーターを取り付ける前に、既存のペネトレーターをエンドキャップから取り外す必要があります。 必要なもの 必要なもの 必要なもの ドライバーを使って、フェアリングをフレームパネルに固定しているセルフタッピングネジを外してください。各フェアリングは4本のネジで固定されています。 ROV(遠隔操作車両)のバッテリー寿命を最大限にし、操作を快適に行うためには、ROVを水中で水平に浮かせ、中性浮力をできるだけ達成することが大切です。中性浮力とは、ROVが浮上も沈降もしない状態で、水中で同じ深さを保つことを意味します。 もしROVが水平でない場合や、片方の方向に過度に浮いている場合、安定性を保つために余計な力を使う必要があり、その結果、バッテリーが早く消耗します。 ROVにアクセサリーを取り付けたり取り外したりする際には、その都度バラストの調整が必要です。ROVの下部に取り付けられたバラストの重りは、希望のバランスを保つために追加したり、取り外したり、または再配置したりすることができます。 ROVのバラスト調整は、ROVの安定性、制御性、安全性、そしてバッテリー寿命を最大化するために非常に重要です。以下は、BlueROV2のバラスト調整方法です。 必要なもの 調整手順 中性浮力を完全に達成できない場合 一般的にはROVがわずかに浮く(正の浮力)状態にすることが望ましいです。ROVが完全に中性浮力に達していなくても、わずかに浮く方が制御しやすく、バッテリーの消費を抑えることができます。 ドームとアクリルチューブは、アクリル専用のクリーナーまたは水でのみ清掃してください。溶剤、アルコール、その他のクリーナーを使用すると、素材に傷がつく恐れがありますので避けてください。 これらの図は、ROV内のコンポーネント間の電気的接続を示す概要です。Blue Roboticsが作成した、ROVのバージョンごとに異なる図があります。 以下の表は、デフォルトのBlueROV2およびBlueROV2 Heavyの自動操縦サーボ出力チャネル構成と関連パラメータを示しています。このデフォルト設定は、Navigator Flight Controllerおよび製造が終了したPixhawk 1の両方に適用されます。
バッテリー
BlueROV2で使用できる推奨バッテリー
リポ / リチウムイオンバッテリーの安全性
バッテリーの充電方法
リポバッテリーを1セルあたり3.2ボルト以下に放電させないことが重要です。4Sバッテリーの場合は、12.8ボルト以下にしないようにしましょう。
公称電圧が**14.8ボルト(4Sパック)**のリポバッテリーは、**16.8ボルト(セルあたり4.2ボルト)**で満充電になります。
16.8ボルトを超えて充電すると、バッテリーが損傷したり発火する可能性があるため、注意してください。
リポバッテリーは、リポ対応充電器を使用して充電してください。リポ互換充電器は過充電を防ぎ、安全に充電するために必須です。
リポバッテリーは、容量の1倍(「1C」)以下の電流で充電することをお勧めします。バッテリーの交換方法
BlueROV2を砂地や汚れた場所を避け、乾燥した清潔な場所に移動します。
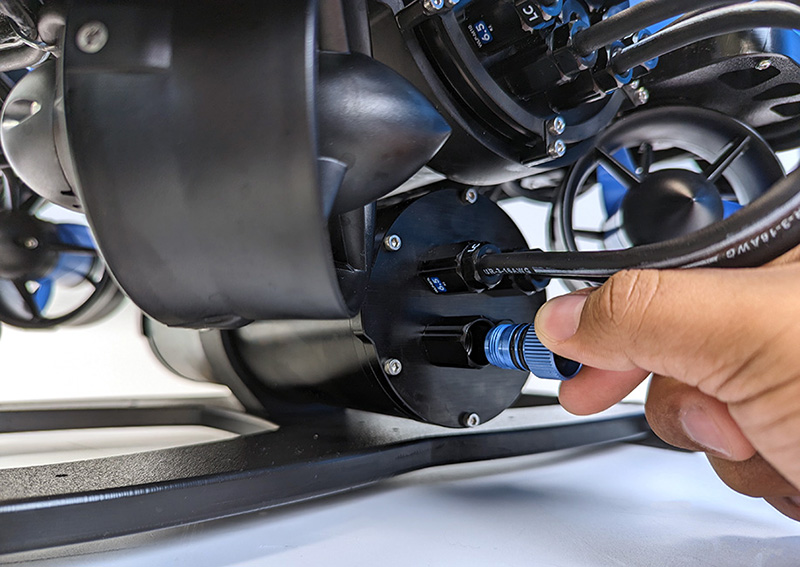
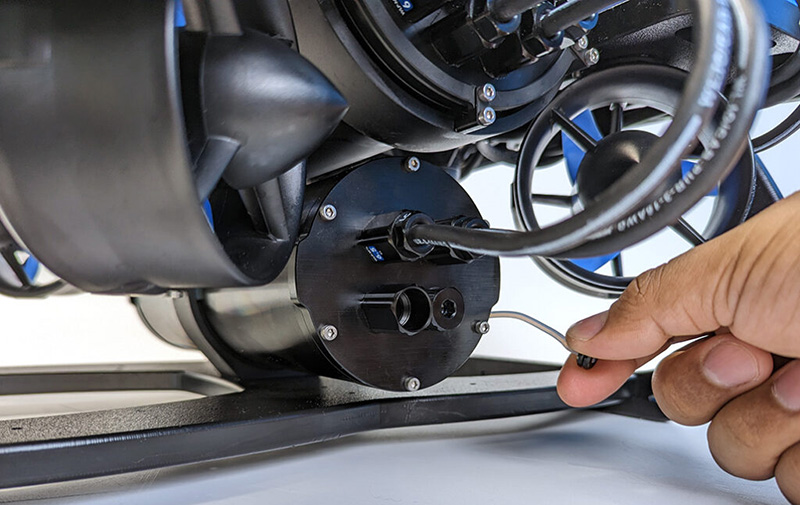
ベントペネトレーターからベントプラグを外し、プラグを安全な場所に保管します。
バッテリー筐体から4穴エンドキャップアセンブリ(エンドキャップ+フランジの一体構造)を慎重に取り外します。
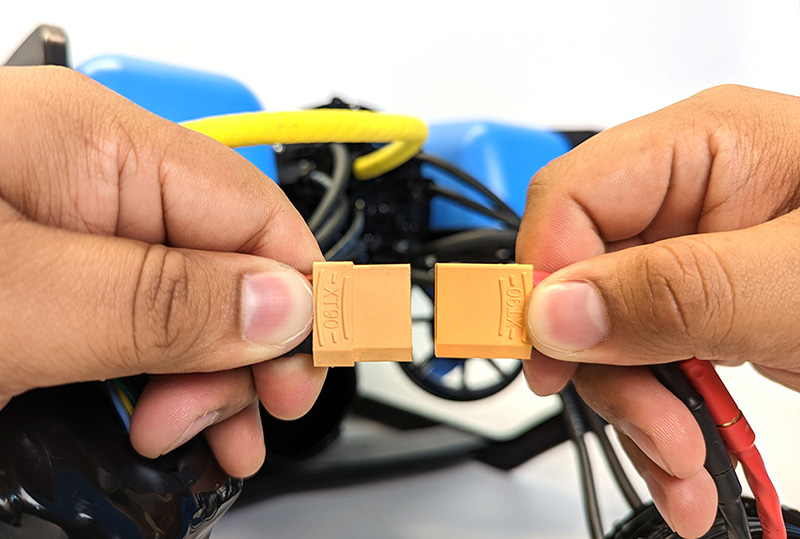
バッテリーの接続を外し、筐体からバッテリーを取り出します。
新しいバッテリーを接続し、バッテリー筐体に収めます。
4穴エンドキャップのOリングが正常であることを確認し、バッテリー筐体に取り付けます。
ベントプラグのOリングを点検し、ベントペネトレーターにしっかりと取り付けます。初めてのダイビングの準備
初めてのダイビングは、浅くて静かで透明な水域を選びましょう。プールやテストタンクのような制御された環境が最適です。
ダイビング前に、ROVが正しくバラストされていることを確認します。これにより、水中での安定した動作が保証されます。
コントローラーが正しく設定されていることを確認し、ROVが期待通りに動作するかテストしてください。バッテリーの接続
トップサイドコントロールの設定
真空テスト
真空テストを行う手順
電子機器筐体とバッテリー筐体の両方からベントプラグを外します。
真空プラグの一方を電子機器筐体のティーに、もう一方をバッテリー筐体に取り付けます。
ポンプを使用して、ゲージが**10 in. Hg [34 kPa]**の真空圧になるまで吸引します。
BlueROV2とポンプをそのまま15分間放置します。
ダイビング前のチェックリスト
総合チェックリスト
ROVがQGroundControlに正しく接続されていることを確認します。
M3六角キー(短い部分をハンドルとして使用)またはM3六角ドライバーを使い、フレームをセンターパネルおよびボトムパネルに固定しているM5x16ネジをしっかり締めます。
M2.5六角ドライバーを使用して、バックエンドキャップをフランジシールに固定しているM3x12ネジを確実に締めます。
クリップを電子機器筐体に固定しているM3x16ネジが緩んでいないか確認し、必要に応じて締め付けます。
バラストウエイトを時計回りにゆっくりとねじ込みます。
サイドパネルを引っ張り、フレームをひねって確認します。
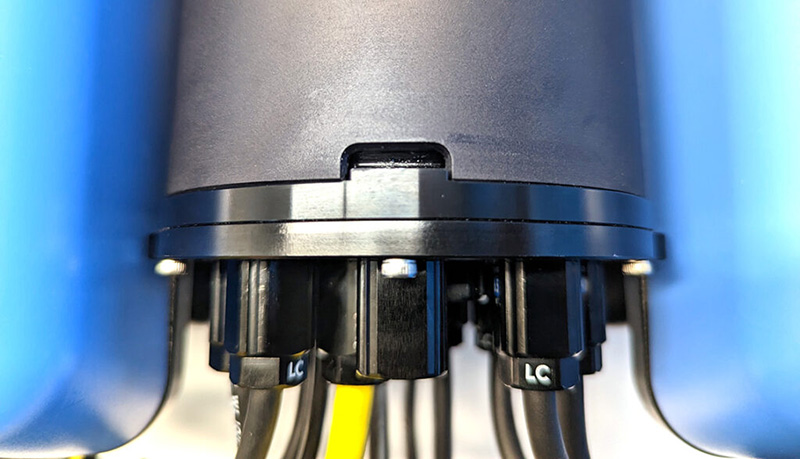
14穴のエンドキャップに入るケーブル束を引っ張り、しっかりと接続されているか確認します。
テザーシンブルを引っ張り、ひねって確認します。
すべてのペネトレーターを手で緩めてみて、締め直す必要がないか確認します。
ベントプラグが取り付けられていることを確認します。
バッテリー筐体を押し、ひねって取り付け状態を確認します。
バックエンドキャップを固定しているネジがすべて取り付けられ、しっかり締まっていることを目視で確認します。
すべてのスラスターを引っ張り、しっかりと固定されているか確認します。
フェアリングをつかんで振り、しっかり取り付けられているか確認します。
ルーメンを引っ張り、しっかりと接続されていることを確認します。
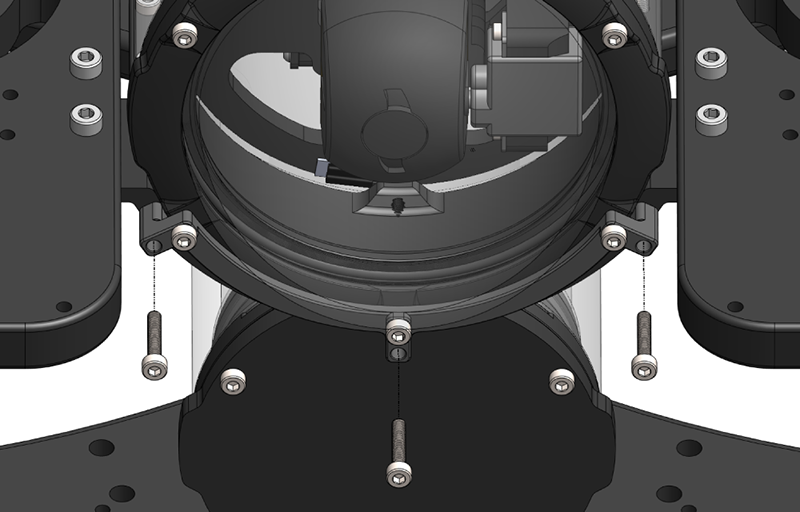
ドームとフロントバッテリーエンドキャップを固定しているすべてのネジが取り付けられ、しっかり締まっていることを目視で確認します。
電子機器とバッテリーエンクロージャーのラジアルシールにシリコングリースが塗布され、無傷であること(ひび割れやスライスがないこと)を目視で確認します。
ROVを地上に置き、スラスターに近づかないように注意を促します。
カメラのチルト機能とライトが正常に動作していることを確認します。動作しない場合は、トラブルシューティングセクションを参照してください。
ROVをマニュアルモードに設定します。
ROVを起動します。
前進/後進スティックを前方に押して、ベクタースラスターが自由に回転していることを確認します。
上昇/下降スティックを前方に押して、垂直スラスターが自由に回転していることを確認します。
ROVを解除します。
起動後、すべてが正常に動作していることを最終確認します。潜水前チェックリスト
ROVがQGroundControlに接続されていることを確認します。
バラストウエイトを時計回りにゆっくりとねじ込みます。
サイドパネルを引っ張り、フレームをねじって確認します。
14穴のエンドキャップに入るケーブル束を引っ張って確認します。
テザーシンブルを引っ張り、ひねって確認します。
すべてのペネトレーターを手で緩めてみて、しっかり締まっているか確認します。
ベントプラグが取り付けられていることを確認します。
バッテリーの筐体を押し、ひねってしっかり取り付けられているか確認します。
バックエンドキャップを固定しているネジがすべて取り付けられ、しっかり締まっていることを目視で確認します。
すべてのスラスターを引っ張り、正常に作動することを確認します。
フェアリングをつかんで振り、しっかり取り付けられていることを確認します。
ルーメンを引っ張り、しっかり接続されていることを確認します。
ドームとフロントバッテリーエンドキャップを固定しているすべてのネジが取り付けられ、しっかり締まっていることを目視で確認します。
電子機器とバッテリー筐体の放射状シールにシリコングリースが塗布され、無傷であること(ひび割れや切れがないこと)を目視で確認します。
ROVを地上に置き、スラスターに近づかないように確認します。
カメラのチルト機能とライトが正常に動作することを確認します。動作しない場合は、トラブルシューティングセクションを参照してください。
ROVをマニュアルモードにします。
ROVを起動します。
前進/後進スティックを前方に押して、ベクタ式スラスターが自由に回転していることを確認します。空中で30秒以上スラスターを作動させないようにします。
上昇/下降スティックを前方に押して、垂直スラスターが自由に回転していることを確認します。スラスターを空中で30秒以上作動させないでください。
ROVを解除します。
これで起動準備が整いました。BlueROV2起動

すべての起動において注意すべき点
泳いでいる人やダイバーの近くではROVを起動しないでください。
ROVが水に触れる前に放さないようにし、必要に応じてテザーを使用してROVを下降させます。降ろす際は、ドームを硬い物や鋭利なものに近づけないように注意してください。
ROVを浅すぎる水域で起動しないようにしてください。
ROVが水中にあることを知らないボートからROVを遠ざけてください。
ROVが水中に入り、ランチャーがROVから離れるまで、アーム操作はしないようにしてください。ボートでの起動
ROVとテザーをボートのプロペラやジェットに近づけないようにしてください。
ROVを発射する際には、必ずボートの船長に知らせてください。陸上での起動
波が激しい場所ではROVを打ち上げないようにしてください。
ROVを駆動するのに十分な水深があるポイントに移動するため、ROVを水の中に入れる必要がある場合があります。コントローラー機能

ピッチとロールの調整
1,トリムロールボタンとトリムピッチボタンを使用する方法
2,ロール&ピッチ切り替えボタンと左手サムスティックを使う方法
ロール&ピッチトグルボタンを使用するには、ビークルセットアップメニューのジョイスティックタブでroll_pitch_toggle機能をコントローラーのボタンに割り当てる必要があります。下図のように、真ん中のボタンを使用することをお勧めします。ダイブモードがMANUALモードに切り替わると、ロールとピッチの入力はクリアされますが、解除時にはクリアされません。
ボタン設定の変更
機能ボタンと機能パラメータのリスト
機能ボタン
機能パラメータ
アーム
arm
アーム解除
disarm
シフト
shift
カメラチルトアップ
mount_tilt_up
カメラチルトダウン
mount_tilt_down
ゲインを上げる
gain_inc
ゲインを下げる
gain_dec
明るいライト
lights1_brighter
ライト調光
lights1_dimmer
前方トリムピッチ
trim_pitch_inc
トリムピッチ後進
trim_pitch_dec
トリムロール右
trim_roll_inc
トリムロール左
trim_roll_dec
マニュアルモード
mode_manual
デプスホールドモード
mode_depth_hold
スタビライズモード
mode_stabilize
カメラチルトセンター
mount_center
トグル入力ホールド
input_hold_set
ロールとピッチのトグル
roll_pitch_toggle
グリッパーを開く
servo_#_max_momentary*
グリッパーを閉じる
servo_#_min_momentary*
サーボ機能番号
ナビゲーター出力チャンネル
ピクショーク1出力チャンネル
servo_1
9 (Aux 1)
Aux 1
servo_2
10 (Aux 2)
Aux 2
servo_3
11 (Aux 3)
Aux 3
オペレーション
ダイブモード
マニュアルモード:
スタビライズモード:
デプスホールドモード:
テザーの管理
運転ガイドライン
バッテリーのモニタリング
バッテリーのモニタリング手順
動力下でのリカバリー
安全にROVを回収する手順
非電源での回収
適度なペースでテザーを引き寄せる:テザーを引き寄せる際は、できるだけ早く引き込もうとせず、適度なペースで行ってください。急いで引き寄せることは、ROVが障害物に引っかかるリスクを高めたり、テザーが絡まる可能性があります。ダイビング間の保管
近くに日陰がない場合は、ROVにタオルをかけておくことで、十分に日陰を作ることができます。これにより、ROVが高温になりすぎないようにします。ミッション後のチェックリスト
BlueROV2の整備
BlueROV2の電源のオンとオフ
BlueROV2のバッテリーにアクセスする方法

バッテリーカバーを閉じる手順
電子機器エンクロージャーを開ける
BlueROV2内部の電子機器にアクセスする手順
エレクトロニクス・エンクロージャーの前面と背面にある取り付けクリップを外します。各クリップには、エンクロージャーのクレードルに固定されている3本のM3x16ネジがあります。旧型のROVでは、2本のネジと小さな取り付けエクステンションが使用されています。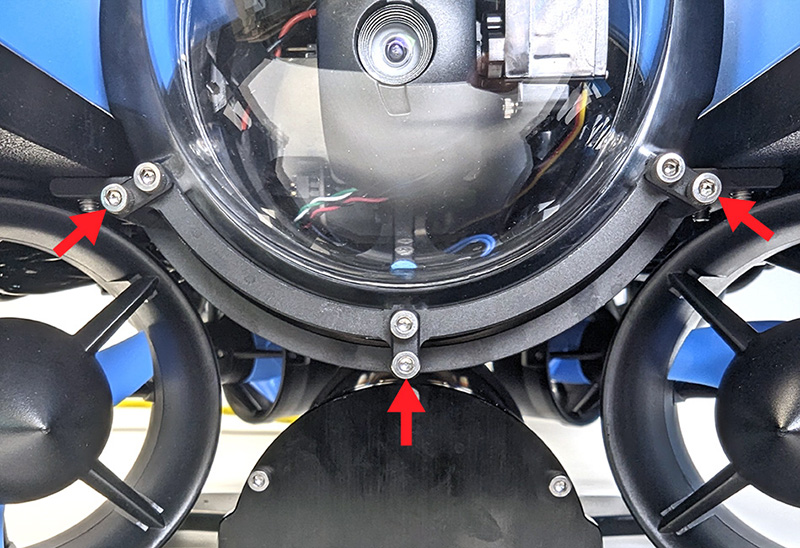
PRVプラグを反時計回りに回して、バルクヘッドから取り外します。古いROVでは、PRVの代わりに通常のベントプラグが使用されています。
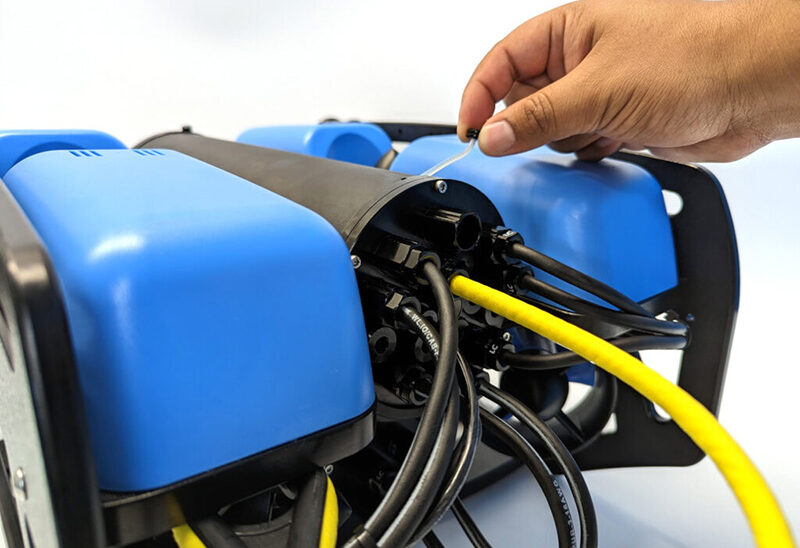
筐体からロックコードを取り外します。古いROVではロックコードがない場合もあります。
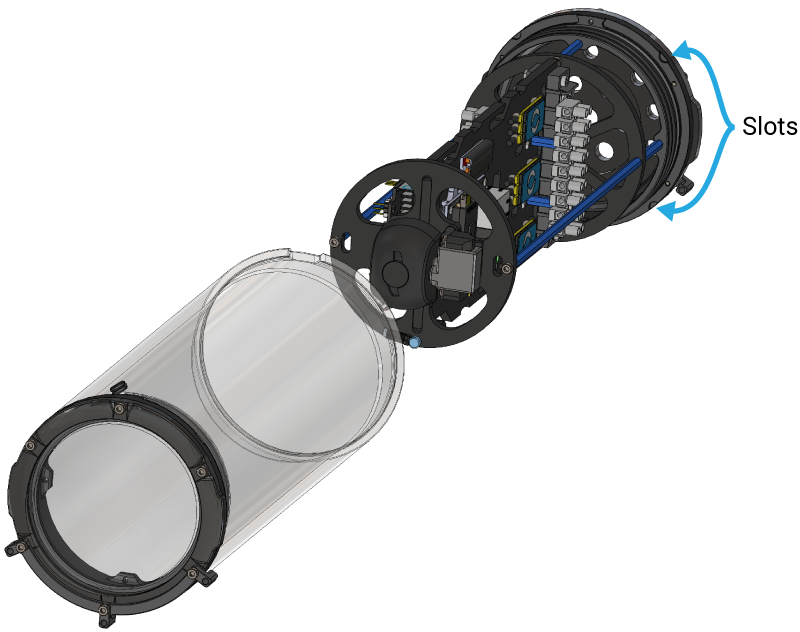
チューブとドーム・アセンブリをエレクトロニクス・エンクロージャー・アセンブリから取り外します。もし難しい場合は、チューブを握り、フランジをエンドキャップのタブから押し上げてください。フランジが外れるまで、エンドキャップの両側のタブから交互に押し上げます。それでも難しい場合は、マイナスドライバーをOリングフランジの溝に差し込んで、チューブとOリングフランジの間に隙間を作り、ドライバーを挟んで取り外します。

電子機器エンクロージャーを再び閉じる時の手順
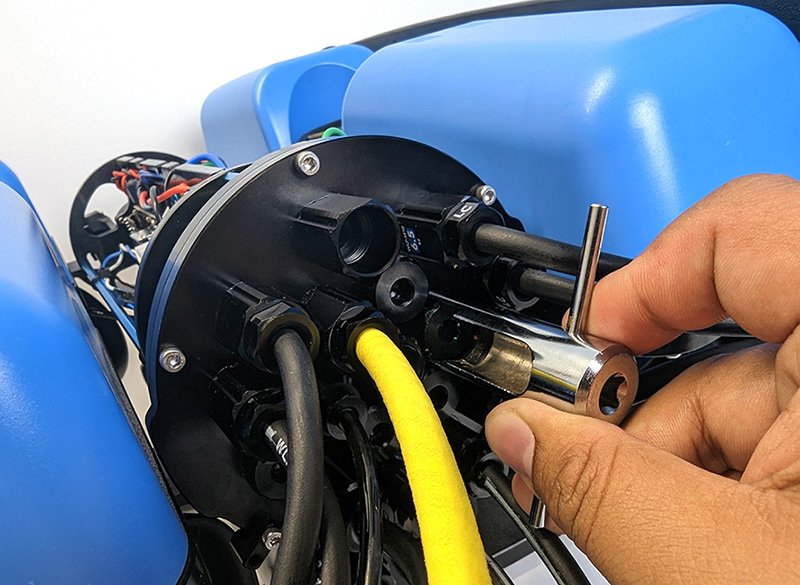
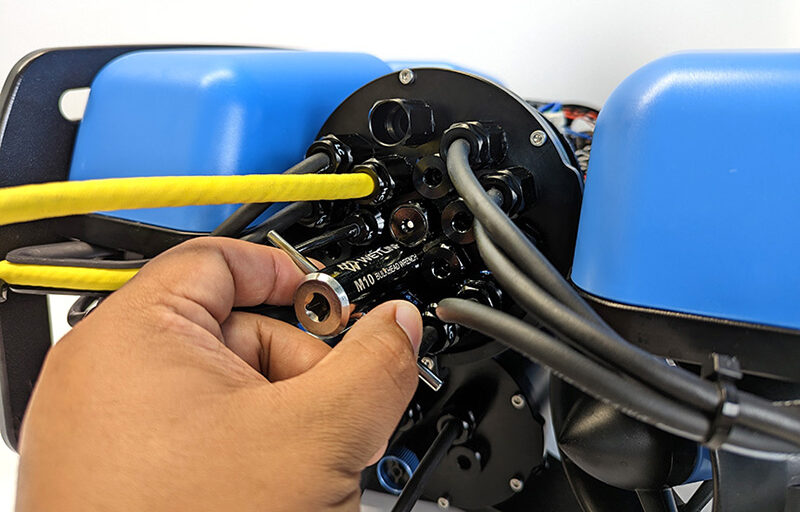
ペネトレータバルクヘッドの取り外しと取り付け
ぺネレーターの取り外し手順
![]()
ぺネレーターの取り付け手順

フェアリングの取り外し手順
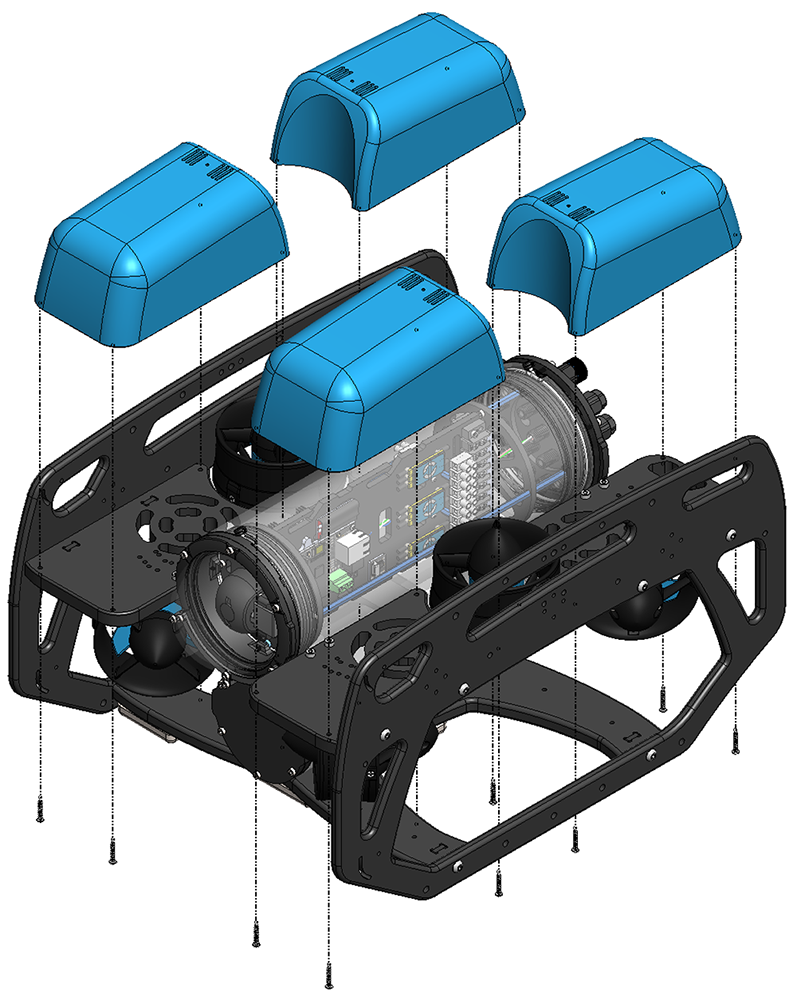
フェアリングの取り付け手順
フェアリングを元の位置に戻し、セルフタッピングネジをフレームパネルのネジ穴に挿入します。
4本のセルフタッピングネジを使用してフェアリングをしっかりと取り付けます。バラストの調整について
BlueROV2のバラスト調整方法
ROVのエンクロージャが密閉され、PRV(圧力解放バルブ)やベントプラグがしっかりと取り付けられていることを確認します。その後、ROVを静かな水中(中型のプールが理想的)に配置し、ROVが自然にどのように浮くかを確認するために十分なスペースを確保します。バラスト調整中は、ROVの電源を切るか、アームを解除しておくと安全です。
水中でROVがどのように浮いているかを確認します。ROVが片側に傾いていたり、ピッチング(前後に傾くこと)していないことを確認します。もしそのような傾きがある場合、ROVを水平に浮かせるために、バラスト重りを追加、取り外し、または再配置します。

ROVが急速に沈んだり、浮上したりしないことが重要です。ROVを腕の半分の長さだけ水中に押し込み、手を離してみて、ROVがその水中レベルを維持できるか確認します。ROVが沈みも浮きもしない場合、それは中性浮力を達成したことを示しています。もしそうでない場合、バラストの重りを追加または取り除いて調整します。予防保全
【24時間ごとまたは2ヶ月ごと】
【100時間運転ごとまたは6ヶ月ごと】
接続図
オートパイロット出力チャネル構成
ナビゲーター
BlueROV2
出力チャンネル
サーボ番号
接続デバイス/機能
SERVO#_FUNCTIONパラメータ
1
SERVO1
スラスター 1
モーター1
2
SERVO2
スラスター 2
モーター2
3
SERVO3
スラスター 3
モーター3
4
SERVO4
スラスター 4
モーター4
5
SERVO5
スラスター 5
モーター5
6
SERVO6
スラスター 6
モーター6
7
SERVO7
スラスター 7
モーター7
8
SERVO8
スラスター 8
モーター8
9
SERVO9
servo_1ボタン機能(ニュートングリッパー)
無効
10
SERVO10
servo_2ボタン機能(ニュートングリッパー)
無効
11
SERVO11
servo_3ボタン機能(ニュートングリッパー)
無効
12
SERVO12
使用しない
無効
13
SERVO13
ルーメンライト
RCIN9
14
SERVO14
ライト2(オプション)
RCIN10
15
SERVO15
未使用
無効
16
SERVO16
カメラチルトサーボ
マウントチルト
BlueROV2 Heavy
出力チャンネル
サーボ番号
接続デバイス/機能
SERVO#_FUNCTIONパラメータ
1
SERVO1
スラスター 1
モーター1
2
SERVO2
スラスター 2
モーター2
3
SERVO3
スラスター 3
モーター3
4
SERVO4
スラスター 4
モーター4
5
SERVO5
スラスター 5
モーター5
6
SERVO6
スラスター 6
モーター6
7
SERVO7
スラスター 7
モーター7
8
SERVO8
スラスター 8
モーター8
9
SERVO9
servo_1ボタン機能(ニュートングリッパー)
無効
10
SERVO10
servo_2ボタン機能(ニュートングリッパー)
無効
11
SERVO11
servo_3ボタン機能(ニュートングリッパー)
無効
12
SERVO12
使用しない
無効
13
SERVO13
ルーメンライト
RCIN9
14
SERVO14
ライト2(オプション)
RCIN10
15
SERVO15
未使用
無効
16
SERVO16
カメラチルトサーボ
マウントチルト
ピックホーク1
BlueROV2
出力チャンネル
サーボ番号
接続デバイス/機能
SERVO#_FUNCTIONパラメータ
メインアウト 1
SERVO1
スラスター 1
モーター1
メインアウト 2
SERVO2
スラスター 2
モーター2
メインアウト 3
SERVO3
スラスター 3
モーター3
メインアウト 4
SERVO4
スラスター 4
モーター4
メインアウト 5
SERVO5
スラスター 5
モーター5
メインアウト 6
SERVO6
スラスター 6
モーター6
メインアウト 7
SERVO7
ルーメンライト
RCIN9
メインアウト 8
SERVO8
カメラチルトサーボ
マウントチルト
Aux Out 1
SERVO9
servo_1ボタン機能 (ニュートングリッパー)
無効
Aux Out 2
SERVO10
servo_2ボタン機能 (ニュートングリッパー)
無効
Aux Out 3
SERVO11
servo_3ボタン機能 (ニュートングリッパー)
無効
Aux Out 4
SERVO12
未使用
無効
Aux Out 5
SERVO13
未使用
無効
Aux Out 6
SERVO14
SOSリーダークディテクター
無効
SBUS (SB)
-
5V in (5V 6A 電源)
RCIN (ラジコン)
-
未使用
BlueROV2 Heavy
出力チャンネル
サーボ番号
接続デバイス/機能
SERVO#_FUNCTIONパラメータ
メインアウト 1
サーボ1
スラスター1
モーター1
メインアウト 2
サーボ2
スラスター2
モーター2
メインアウト 3
サーボ3
スラスター3
モーター3
メインアウト 4
サーボ4
スラスター4
モーター4
メインアウト 5
サーボ5
スラスター5
モーター5
メインアウト 6
サーボ6
スラスター6
モーター6
メインアウト 7
サーボ7
ルーメンライト
RCIN9
メインアウト 8
サーボ8
カメラチルトサーボ
マウントチルト
補助アウト 1
サーボ9
servo_1ボタン機能 (ニュートングリッパー)
無効
補助アウト 2
サーボ10
servo_2ボタン機能 (ニュートングリッパー)
無効
補助アウト 3
サーボ11
servo_3ボタン機能 (ニュートングリッパー)
無効
補助アウト 4
サーボ12
使用されません
無効
補助アウト 5
サーボ13
使用されません
無効
補助アウト 6
サーボ14
SOSリークディテクター
無効
SBUS (SB)
-
5V IN (5V 6A電源)
-
RCIN (ラジコン)
-
使用されません
-





{kind=link}