石田一浩(Ishida Kazuhiro)

水中ドローンBlueROV2の販売からカスタマイズ、無人ボートの開発


2024/10/5
※すべてのネジにはネジロック材を1滴たらし均等に広げてください。 標準バージョンの場合、2.5 mm六角ドライバーで2本のM4x10ネジを使用して、各フレーム脚の下部に2本のゴム製脚を取り付けます。2つの同じものを組み立てます。 大型バージョンの場合、2.5 mm六角ドライバーで2本のM4x10ネジを使用して、各フレーム脚の下部に3本のゴム製脚を取り付けます。 最初のフレームの半分を組み立てる 6本のM4x20ネジと2.5mm六角ドライバーを使用して、2本の脚と1本のフレームのハンドルをサイドパネル側にネ ...

2024/10/5
BlueROV2を水中に入れる前には、真空テストを必ず行ってください。 また、ペネトレータやOリングを交換するなど、シールを傷めるものを交換した後も真空テストが必要です。 このテストは、エンクロージャー内に外部から空気が入り込むかチェックしています。真空ポンプで一定数まで空気を抜き放置します。その後、空気が入らなければ問題なし。空気がどこからか入り、数値が下がれば水中に入れてはいけません。空気が入るという事はどこからか水が浸入してくることを意味しています。 下記の手順でチェックをしてみましょう。 Blue ...

2025/1/18
BlueROV2のバッテリーを装着するには、次の手順で行ってください。 ※機体に砂埃やゴミが付着しない場所で作業をしてください。 バッテリエンクロージャーからベントプラグを外し、次にエンドキャップを取ります バッテリエンクロージャーからバッテリーを外します バッテリーはコネクターの形が合うように接続します。 バッテリーを接続した後、エンクロージャーへ入れてください。 バッテリーのケーブルに負荷が掛からないように丸めて収納します。 バッテリーエンクロージャとエンドキャップの間に大きな隙間ができないように閉め ...
2025/1/18
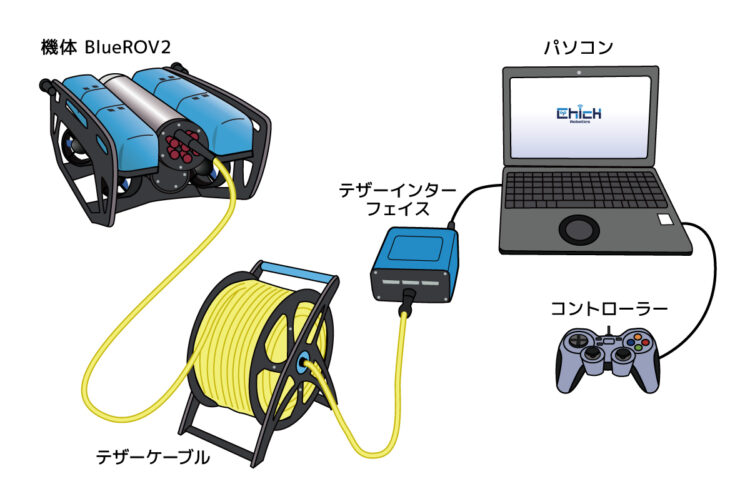
接続する箇所は下記の5点。 機体とリールから出ているテザーケーブル(リールがない場合はテザーケーブル) 機体フレームとテザーケーブルをカラビナ部分で接続 リールとテザーインターフェース(短い黄色いテザーケーブル) テザーインターフェースとPC(USB接続) PCとコントローラー(USB接続) ※順不同 機体とリールから出ているテザーケーブル(リールがない場合はテザーケーブル) テザーケーブルと機体を繋ぐ8ピンコネクタは凹凸を合わせて接続します。 写真のように1パターンしか入らないようになっています。 接続 ...

2024/10/5
オペレーティングシステムとサポートソフトウェアは、事前設定された.imgファイルをSDカードに書き込んでインストールし、SDカードをコンパニオンコンピューター(Raspberry Pi)に挿入します。 準備 コンパニオン画像をダウンロードします ダウンロード イメージのダウンロード中に、Etcherをダウンロードしてインストールします。OSに合ったバージョンをダウンロードしてください。 Etcherダウンロード Etcherのインストール ダウンロードしたbalenaEtcher-Setup-xxxをダブ ...
2024/10/5
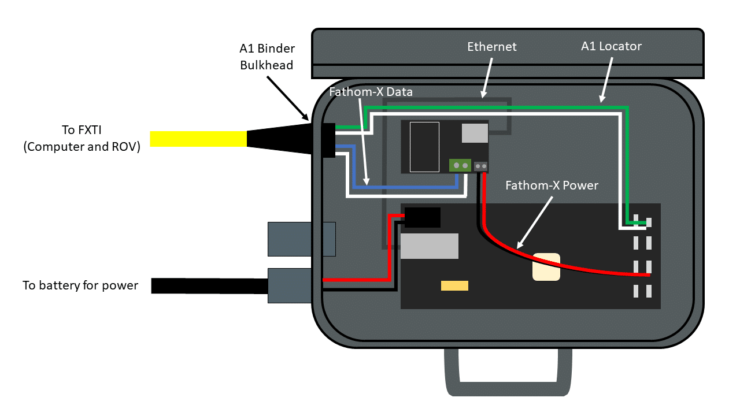
水リンク水中GPSは、音響測位とGPSを水中の位置を表示させます。 接続にはこちらのキットを使います。 ボックスの側面にあるイーサネットケーブルをWater Linkedボードの下に配線し、Fathom-Xモジュールに差し込みます。 青と白のワイヤーをFathom-Xボードの正と負のテザー入力端子に接続します。 A1プラグを緑と白のワイヤーでA1レセプタクルに差し込みます。 WaterLinkedボックス内 WaterLinkedシステムの設定 すべての接続が完了し、機体に電源が入っていることを確認し、ブ ...

2024/10/5
Binder770コネクタは、テザー接続用の標準コネクタになります。 コンパクトなサイズであるコネクタは8ピンで、嵌合されるとIP67防滴となります。現在、Binder770コネクタはFathomテザーに全てに事前に取り付けられるようになりましたが、このコネクターを使って古いテザーを改造することが可能です。 コネクタの電流定格はピンあたり2Aで、定格は175V(1750Vインパルス)、5000を超える嵌合サイクルを処理することができます。ピンは金メッキ加工がされています。 Binder 770コネクタへの ...
2024/10/5
ケーブル修理キットには損傷したケーブルまたはテザーを仮修理するために必要なすべての材料が入っています。キットには2つの特殊な材料、同軸シールとシリコンテープが含まれています。同軸シールは手で成型することが可能で、無害かつ非導電性のプラスチックで、ほとんどの表面に付着します。 シリコンテープは、柔軟でUV耐性があり、それ自体にのみ融着するテープです。 修理で使用する場合、同軸シールは防水バリアを形成し、シリコンテープは破片からの保護に使用されます。 ダイビングの日にこれらのツールを持っていけば、ケーブル損傷 ...

2024/10/5
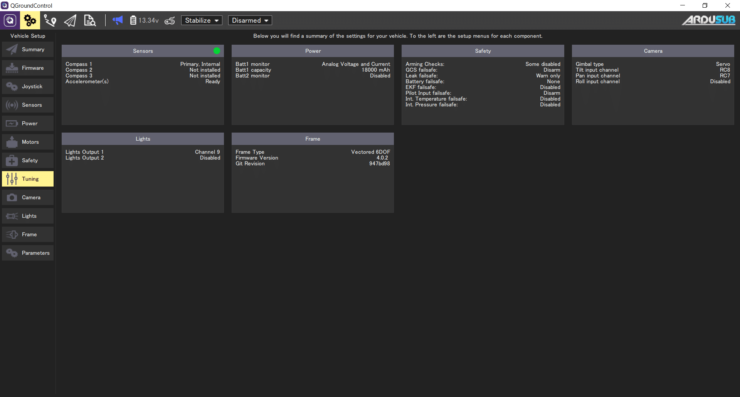
ソフトウェアやファームは不定期にバージョンアップされます。各種アップデートの方法をこちらで解説します。 QGroundControlソフトウェアを更新するには、QGroundControlインストールをご覧ください。 機体側のファームアップデートの手順 1. 機体にバッテリーをつなげ、テザーインターフェース、PCとすべての接続を完了させます。接続についてはこちら 2. ブラウザで192.168.2.2:2770/networkにアクセスし、ご利用のWi-Fi環境を入力してください。 3. 192.168 ...
2024/10/5
BlueROV2を扱うには専用のソフトウェアQGroundControlが必要となります。ここではインストール方法を解説します。 QGroundControlをダウンロードする まずはQGroundControlをダウンロードしましょう。下記のボタンをクリックして最新版をダウンロードしてください。 最新版ダウンロード QGroundControlをインストールする 1. 実行ファイル「QGroundControl-installer.exe」をクリックしてインストールを開始しましょう。 ユーザーアカウント ...
2025/1/18
スラスターにはプロペラが装着されています。標準タイプのBlueROV2には計6つのスラスタがあり、統計回り及び反時計回りと、装着させる場所により取り付けるタイプが決まっています。 プロペラ交換時は、プロペラの形に注意して間違えのないようご注意ください。 STEP1 フェアリングと浮力フォームを外す まずは、4つの青色のフェアリングを浮力ファームごと外してください。 各フェアリングに4つのネジ、計16つで固定されていますので、プラスドライバーで外します。ネジは下方向から留められています。 ■工具 プラスドラ ...
2024/9/23
風力発電には「洋上風力」と呼ばれるものがあります。初めて聞く方が多いかもしれませんが、日本では需要電力の10倍ほどの容量を発電可能と考えられているほどです。 ここでは高い潜在能力が期待される「洋上風力」についてご紹介。日本での運用やドローン等ロボット業界との関係性に迫っていきます。 洋上風力とは 「海洋上」の「風力発電」が、洋上風力発電(洋上風力)と呼ばれています。洋上=offshoreから、オフショア風力発電とも。ここでいう海洋上の定義は「水の上」であり、フィヨルドや港湾、大きな湖なども対象となります。 ...