石田一浩(Ishida Kazuhiro)

水中ドローンBlueROV2の販売からカスタマイズ、無人ボートの開発

2025/1/5
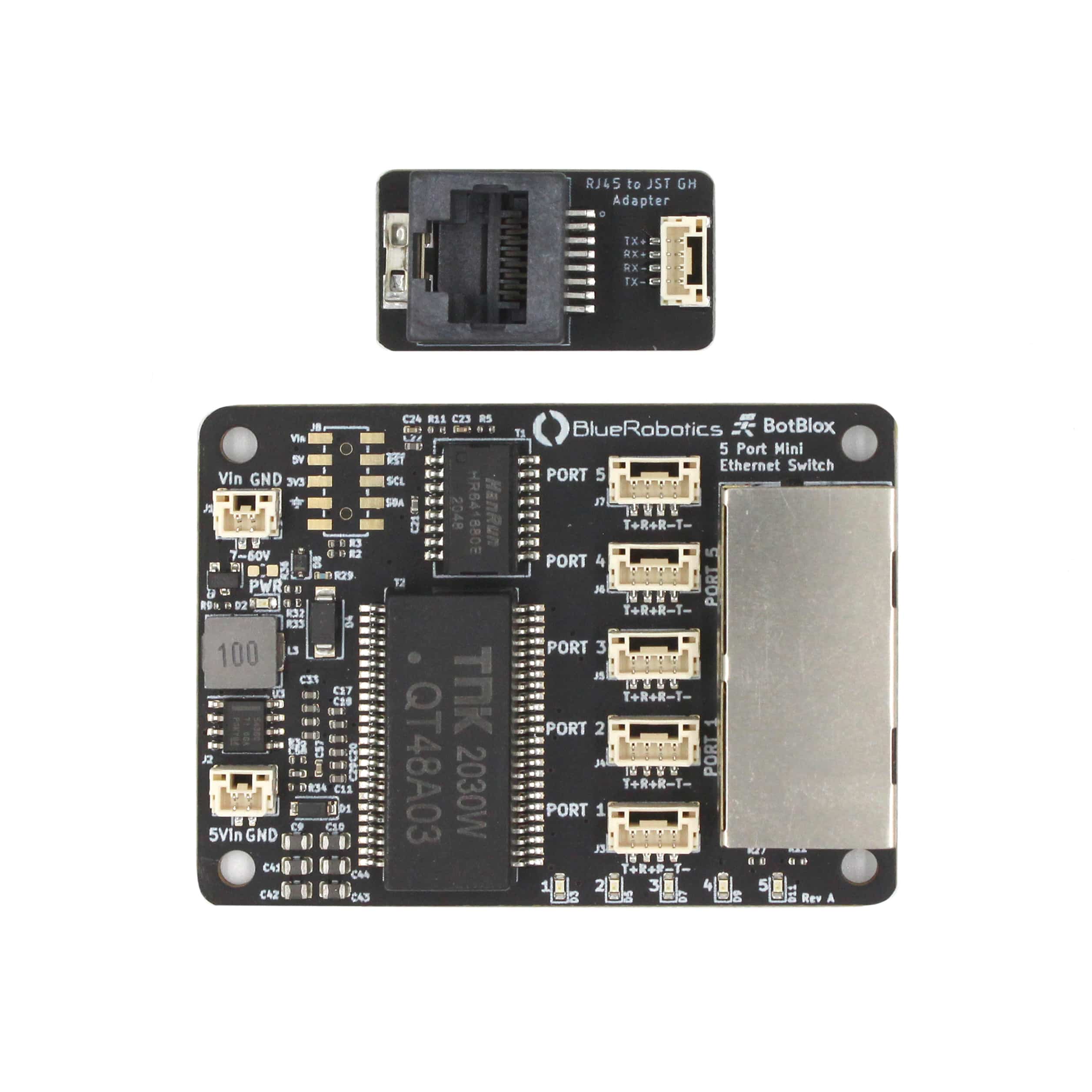
このイーサネットスイッチは、BlueROV2やBlueBoatのために設計された5 ポート10/100イーサネットスイッチで、アクセサリを接続するための 3つの追加イーサネットポートがあります。

2024/10/5
Fathom-X テザーインターフェース(またはFXTI)は、BlueROV2とのインターフェースをとるためのシンプルで拡張可能な上面エンクロージャーです。
2024/10/9
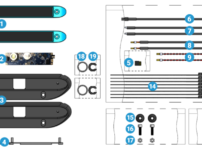
Cerulean Omniscan 450 SSはBlueBoatとシームレスに統合され、サイドスキャンソナーイメージングを通じて水中の物体を特定し識別することで、海底の地図作成を支援します。このガイドでは、BlueBoatへの取付方法について説明します。 キットの内容 2 x Cerulean Omniscan 450 SS トランスデューサー 2 x セルリアン オムニスキャン 450 SS PCB 2 x アルミニウムトランスデューサーブラケット 2 x アルミニウム PCB スタンドオフ Blue ...

2024/10/5
T200およびT500は、高出力ROV、水上船舶、AUV、およびカヤックのような人を乗せる用途など、多くの用途で頑丈、強力、かつ柔軟に使用できるように設計された水中スラスターです。 本記事では、T200またはT500スラスタの操作、サービス、およびトラブルシューティングの方法を説明しますので、ぜひ参考にしてください。 T500スラスター T200スラスター なお、安全に利用する上で、以下の点には十分注意してください。 水中で電気を扱うときは常に注意する ケガを避けるため、体の一部をスラスターのインレットと ...

2024/10/5
Ping360ソナーは、メカニカル・スキャニング・ソナーです。 ロープ、壁、ドックの杭、岩、難破船、ボートなど、音波を反射する構造物や物体からのエコーを見ることができます。 これにより、水の見え方に関係なく、航行するための基準点を得ることができ、水中の重要な特徴を素早く見つけられるでしょう。 Ping360のユニークな特徴の一つは、いくつかの配線を変更することで、ユーザーが設定可能な通信インターフェイスの種類を持つ能力です。 本記事では、Ping360をUSB、RS-485、またはイーサネット通信用に設定 ...

2024/10/5
当社の新世代防水エンクロージャーは、ロックコードでエンドキャップをチューブに固定し、不用意に外れるのを防ぎます。 しかし、このようなセキュリティの強化は、チューブ内に過度な圧力がかかるのは危険な状況という意味です。 圧力開放弁(PRV)は、水密エンクロージャー内で発生する可能性のある内圧が12±3psiに達すると、自動的に安全に開放されるように設計されています。 そこで本記事では、PRVを防水エンクロージャーに取り付ける方法と、関連アクセサリーの使用方法について説明します。 安全性について 圧力開放弁(P ...

2024/10/5
WetLinkペネトレーター(WLP)は、当社製品に使用されている多種多様なケーブルのシーリングを可能にします。 WLPは非常に便利なので、お客様のプロジェクト用に、直径3.7~9.8 mmのケーブルをカバーするWLPサイズを取り揃えています。 このページの翻訳記事です 本記事では、製品ラインがどのように機能するのか、技術仕様表を使ってケーブルに適したWLPサイズを選ぶ方法、そして漏れがないことを確認するために組み立て中と組み立て後にチェックすべき点について説明します。 当社のこれまでのテス ...
2024/10/5
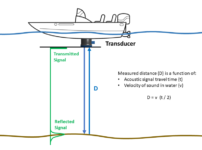
Blue Robotics Ping Echosounder and Altimeterは、水中の物体までの距離を測定する水中ソナーです。 このページの翻訳記事です メモ 航続距離100メートル、ビーム幅25度、水深300メートル。 ROVやAUVの高度計として、USVやボートの水深調査、あるいは海洋ロボットの障害物回避ソナーとして使用できます。 本記事では、ソナーの一般的な操作方法と、Ping Viewerソナーインターフェースの使用方法について説明します。 ・Ping2 Soner Altimeter ...

2024/10/5
アドバンストROVエレクトロニクスパッケージは、ROVに必要なすべての電子装置をArduSubを搭載して提供します。 本記事では、アドバンスドROVへの接続方法と組み立て方法を説明しますので、ぜひ参考にしてください。 なお、ハードウェアとソフトウェアがどのように連動するかについては、ArduSubのドキュメントをご覧ください。 パーツおよびツール 必要なもの(キットには含まれていません) ROVと地上のコンピュータとの通信用に、少なくとも2本のワイヤーを備えたケーブル(テザー、ネットワークケーブル、または ...

2024/10/5
WetLinkペネトレータ(WLP)は、組み立てが簡単で、接着剤、ポッティングコンパウンド、ゴム成形を必要としません。 WLP組立ツールまたは一般的なハンドツールを使用して、ウェットリンクペネトレータを組み立てる方法をご紹介します。 ケーブルの下地処理 組み立ての前に、ケーブルのジャケットを剥く必要があります。 ブルーロボティクスのケーブルの剥き方については、ケーブルジャケット剥き方のチュートリアルをご覧ください。 ケーブルを剥く際には、ケーブルジャケットの切り口が、ケーブルに対して垂直に真っ直ぐであるこ ...

2024/10/5
BlueBoatの操作を円滑に行うためには、ソフトウェアおよびネットワークの設定が必要です。 そこで本記事では、BlueBoatのソフトウェアやネットワーク、コントローラーなどのセットアップについて、詳しく解説します。 設定前に必要な準備 BlueBoatのソフトウェア設定には、BlueBoatとBaseStationのペアリング、コンピューターのBaseStationへの接続、QGroundControlのインストール、センサーの調整が含まれます。 また、BlueBoatを操作するには以下のOS搭載され ...

2024/9/26
ベトナムのホーチミンで開催された「AWE 2023 - ASEAN Wind Energy」は、ASEAN地域における陸上及び洋上風力発電の最前線を示す展示会&カンファレンスでした。多岐にわたる出展品目と革新的なアイデアが融合し、風力エネルギーの将来に対する期待が高まるイベントでした。 ホーチミンへの航路 日本からホーチミンへの旅は、新たな発見と期待に満ちていました。 飛行時間は約6時間で、窓から見える変わりゆく景色や空港の活気が、この旅の素晴らしいスタートを告げていました。 AWE 2022の全体像 T ...