石田一浩(Ishida Kazuhiro)

水中ドローンBlueROV2の販売からカスタマイズ、無人ボートの開発


2025/1/5
Blue Roboticsが提供するT500とT200スラスターは、海洋ロボットや水中ドローンに幅広く利用されています。この記事では、両者のスペックや性能、用途の違いをわかりやすく比較し、選択のヒントを記載します。 パフォーマンスの違い 最大推力 T500の推力(16.1 kgf)T200の約3倍。 T200(5.1 kgf) 動作電圧 T500は高電圧対応(7~24V)、T200は低電圧対応(6~20V)。 高電圧が必要な場合はT500、低電圧で十分な場合はT200が適している。 耐久性と使用環境 耐深 ...

2025/1/14
水中ドローンによる水中探査は、海底地形の計測や漁場の資源調査、水中構造物(橋脚や堰堤、パイプラインなど)の劣化チェック、海洋生態系のモニタリングといった、多岐にわたる分野で活用されています。 しかし、これらの現場では、水中に舞う堆積物やプランクトン、底泥の巻き上がりなどが原因で、透明度が大きく低下することもしばしばです。 こうした濁った視界下では、一般的な水中カメラでは明瞭な映像を得るのが難しくなります。 そんな状況で頼りになるのが、BlueROV2に搭載できる濁度対応カメラORPHIECAM300です。 ...
2024/12/16
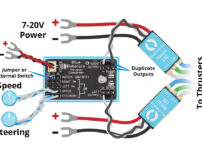
スラスターを簡単に制御するためのシンプルなソリューション スラスターコマンダーは、T100やT200スラスターを簡単に制御するために設計された専用コントローラーです。DIYプロジェクトや小型ボート、ROVの初期テストなどに最適で、直感的な操作性を提供します。 製品の特長 簡単操作 ダイヤル式のスロットルとスイッチ操作で、スラスターのスピードと方向を簡単に制御可能。初心者でも扱いやすい設計です。 複数スラスター対応 最大2つのスラスターを同時に制御可能で、前進、後退、回転といった動作をスムーズに実現します。 ...

2024/10/31
「DVL により、BlueROV2 では以下の3つの位置対応飛行モードが利用可能になります。 さらに、QGroundControl のマップビューで ROVの現在位置をリアルタイムで確認できます。次のセクションでは、各飛行モードの具体的な使い方について詳しく説明します。 相対的位置と全体的位置 DVL は推測航法アルゴリズムを使用して方向と位置を推定します。グローバル位置を決定するために GPS などの外部ソースは使用しません。代わりに、速度と動きを追跡して、最初の開始位置に対する現在の位置を推定します。 ...

2024/10/5
Water Linked DVL A50をBlueROV2で使用するためのソフトウェア設定手順を説明しています。 BlueOSとArduSubのアップデート、DVL拡張機能のインストール、DVLの設定や位置保持モードの活用方法について解説します。 ソフトウェアのセットアップを続行するには、BlueROV2 の電源を入れ、コンピューターに接続します。 BlueOS のアップデート DVL には BlueOS 安定バージョン 1.1.1 以降が必要です。 BlueROV2 はソフトウェア更新を実行するために ...

2024/10/11
今回は、BlueBoatとローランス社のソナーを使って地図を作る方法について解説します。 ローランスエリートFS7は、3つの異なるソナーモードを持つトランスデューサ(変換器)を搭載しています。このシステムを利用することで、手間をかけずに正確な深度データを収集できます。 ただし、リアルタイムで深度データを確認するには、追加のハードウェアが必要です。他メーカーの類似製品と違い、ローランス社のシステムはデータのエクスポートが簡単にできる点が特徴です。 BlueBoatにこのシステムを組み込むためには、取り付けボ ...

2024/10/4
T200スラスターの計算結果 4個使用時 バッテリー数 消費電力 (W) バッテリー最大出力 (W) 出力馬力 (HP) 4セルバッテリー1個 1560 960 1.287 4セルバッテリー2個 1560 1920 2.092 4セルバッテリー3個 1560 2880 2.092 8個使用時 バッテリー数 消費電力 (W) バッテリー最大出力 (W) 出力馬力 (HP) 4セルバッテリー1個 3120 960 1.287 4セルバッテリー2個 3120 1920 2.575 4セルバッテリー3個 3120 ...

2024/10/4
T200およびT500スラスターを使用する際の性能とバッテリーの組み合わせによる馬力計算を徹底解説します。 理論上の馬力と、実際のバッテリー使用状況に基づく出力制限を理解することで、より効率的で効果的な運用ができます。 条件 スラスターの種類と使用個数に応じた馬力計算結果を示しています。 バッテリーの数が1本~4個、T200、T500スラスターを使用し、バッテリーはBlueRoboticsのLithium-ion Battery (14.8V, 18Ah)を使っています。 計算式はこちら スラスターの種類 ...

2025/1/5
このソナーはBlueBoatとシームレスに統合され、サイドスキャンソナーによるイメージングを提供し、水中物体の位置確認や特定、海底のマッピングに役立ちます。
BlueBoatですぐに使用でき、BlueOSのCerulean SonarViewアプリケーションを使用してリアルタイムでデータを視覚化します。
BlueBoatで使用するにはイーサネットスイッチが必要です。
お問合せ下さい

2024/10/5
撮影した動画を静止画に変換して、Agisoft Metashapeを使い写真のボケ具合を確認する方法を解説します。 動画から写真に変換する ここでは、フリーソフトの「Free Video to JPG Converter」を使っていますが、ソフトは何でも問題ありません。 動画をフレームごとに分割し、それぞれのフレームを静止画(jpgなどの画像形式)に変換します。 今回は試しに1秒枚に写真を生成します。保存先を指定して変換をクリックします。 数十秒で指定フォルダに静止画が生成されます。 Met ...

2025/1/16
T500スラスターは、 T200スラスターの3倍の推力を備えた水中スラスターです。24V / 43.5Aの電力定格、頑丈な設計により、高出力ROV、水上艦艇、AUVなどに最適です。WetLinkペネトレーター付き。