

はじめに
Water Linked社のドップラー速度ログ(DVL)は、車両の正確な速度計測を提供し、BlueROV2やその他の車両の位置保持や自律航行を可能にします。

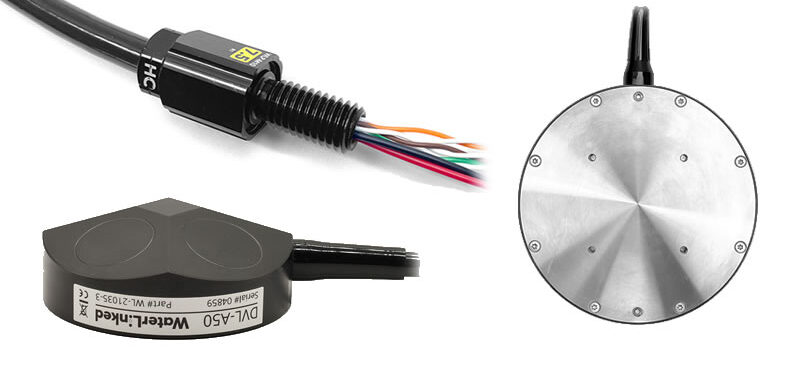
DVL A50の特徴
- 世界最小のDVL。
- 最大水深300mまでの環境で使用可能。
- 測定範囲 : 海底から5cm〜50m。
- 長期的な精度 : ±1%の精度を維持。
注意ポイント
なお、BlueROV2で使用する際は、イーサネットスイッチが必要です。
製品概要
DVL A50とA125は、高性能なDVLでありながら非常にコンパクトな設計で、ROVやAUVの位置保持や自律航行といった高度な機能を実現します。
各モデルには、WetLinkペネトレーター、イーサネットおよびシリアルポート用のJST GHコネクター、電源用のスペードコネクターがプリインストールされており、BlueROV2をはじめとする各種車両への統合が可能です。
また、DVL A50とA125はWater Linked DVLエクステンションを介してBlueOSに対応しており、ROVの位置保持とナビゲーションをサポート。
これにより、より安定した操縦が可能になります。
ドップラー速度とは?
ドップラー速度ロガー(DVL)は、ドップラー効果を利用して海底に対する相対速度を測定する装置です。
DVLには15度の角度で傾けられた4つの音響トランスデューサー(変換器)が搭載されており、音波のパルスを海底に向けて送信し、反射して戻ってきた信号を受信します。
車両が前進すると、ドップラー効果によって反射波の周波数が上昇し、後退すると逆に周波数が低下します。
この変化を測定することで、海底に対する相対速度を非常に高い精度で計測できます。DVLは、水中での正確な位置測定や、わずかな移動の検出に不可欠です。
USBLやSBLといった音響測位システムも存在しますが、これらは数メートル単位の精度しか得られないため、自律航行には不十分です。
一方、DVLは高精度な速度計測を提供し、そのデータを時間積分することで、より正確な位置推定が可能になります。
注意ポイント
ただし、DVL単体では相対位置しか把握できないため、正確な地球座標を得るには、GPSやUSBLなどの測位システムと組み合わせる必要があります。
DVLの革命的進化
Water Linked DVL A50は、DVL技術の価格、サイズ、性能において画期的な進歩を遂げた革新的な製品です。2020年の発売以来、Water Linkedはさらなる改良を続け、ソフトウェアのアップデートを重ねています。
DVL A50のコンパクトさには驚かされます。設置しても、その存在をほとんど意識しないほどの小型サイズです。
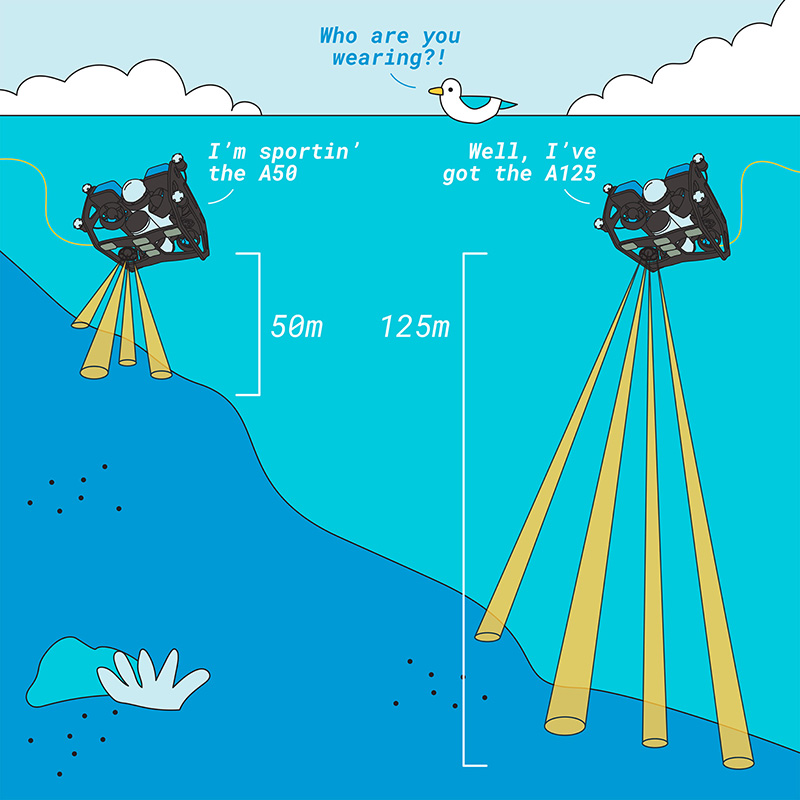
しかし、小型だからといって性能が妥協されているわけではありません。実際、A50は市販されているDVLの中でも優れた性能を誇り、5cmという最短測定距離を実現しています。
これは、海底付近で作業を行うROVにとって、自身の位置を正確に把握するために非常に重要な要素です。
一方、DVL A125は最大125mの測定範囲と600mの耐圧設計を備えており、大型車両や過酷な環境での使用に適しています。
また、最大9m/sの高速移動にも対応しており、高速で運用される車両にも最適です。
オートパイロット(オートROVパイロット)の実現
ROVにおけるDVLは、多くの高度な機能を可能にする欠けていたピースです。
その中でも最も基本的な機能がポジションホールド(位置保持)。
- DVLを使用することで、パイロットが何も操作しなくてもROVは安定した位置を維持できます。
- 操縦桿から手を離しても、多少の水流や外部要因があっても、ROVは自動的にその場にとどまります。
- これにより、操縦が格段に楽になり、ミッションを遂行する際の負担が大幅に軽減されます。
- このポジションホールド機能は、GPSやUSBL測位システムなしでも利用できます!
さらにDVLを活用すれば、ウェイポイントナビゲーション、測量グリッドナビゲーション、ガイドモードなどの自律航行機能も実現可能になります。
ポイント
これらの機能を使用するには、GPSやUSBLといった測位システムを併用するか、地図上で出発点を手動設定する必要があります。
簡単な統合
DVLは、BlueROV2をはじめとするさまざまなアプリケーションに簡単に組み込めるよう設計されています。
本体にはWetLinkペネトレーターがプリインストールされており、さらにイーサネットおよびシリアルポート通信用のJST GHコネクターも搭載。可能であれば、より安定した通信が可能なイーサネット接続を推奨します。
イーサネットを使用すれば、ウェブブラウザを通じてWater Linkedの設定インターフェースにアクセスできるため、より直感的な操作が可能です。
また、電源ラインにはスペード端子が装着されており、10-30Vの電源に対応しています。
簡単なセットアップと多様な互換性
BlueOSを使用している場合、Water Linked DVLエクステンションをワンクリックでインストールするだけで、ハードウェアのサポートが有効になり、ポジションホールドや高度なナビゲーション機能を利用できるようになります。
その他のアプリケーションで使用する場合は、Water Linked APIまたはPD6プロトコルを介してDVLと通信し、柔軟にシステムへ統合できます。
最高精度のアプリケーション向けにアップグレード可能
DVLの精度が1.0%以下になると、輸出規制の対象となります。そのため、**標準仕様のDVL A50およびA125の精度は±1.01%**に設定されています。
しかし、より高精度な測定が必要な場合は、ソフトウェアのアップグレードにより±0.1%まで向上させることが可能です。ただし、このアップグレードには適切な規制ライセンスの取得が必要になります。
アップグレードをご希望の際は、Water Linkedまでお問い合わせください!
技術詳細
DVL仕様比較表(A50 vs A125)
| 項目 | DVL A50(日本語版) | DVL A125(日本語版) |
|---|---|---|
| 電気仕様 | ||
| 供給電圧 | 10〜30 V | |
| 平均消費電力 | 4 W | |
| 起動時突入電流 | 35 W | |
| 音響仕様 | ||
| トランスデューサ周波数 | 1 MHz | 420 kHz |
| トランスデューサ構成 | 4ビーム 凸型ヤヌスアレイ | |
| ビーム角度 | 22.5° | |
| Pingレート | 4〜26 Hz(自動調整) | 2〜15 Hz(自動調整) |
| センサー補助 | 内蔵AHRS/IMU(Yost Labs TSS-NANO) | |
| 最小動作高度 | 5 cm | |
| 最大動作高度 | 50 m(標高35m超では海底条件や塩分濃度により異なる) | 125 m(標高110m超では同様に異なる) |
| 最大速度 | 3.75 m/s | 9 m/s |
| 速度分解能 | 0.1 mm/s | |
| 長期測定精度 | ±1.01% | |
| 通信 | ||
| インターフェース | イーサネット、UART(115200ボー、3.3V) | |
| 初期IPアドレス | 192.168.2.95 | |
| 通信プロトコル | Water Linked API、PD6 | |
すべてのDVLの詳細仕様は、Water Linked公式サイト でご確認いただけます。





は、車両の正確な速度計測を提供し、BlueROV2やその他の車両の位置保持や自律航行を可能にします。 DVL A50の特徴 世界最小の){kind=link}