
Water Linked DVL A50をBlueROV2で使用するためのソフトウェア設定手順を説明しています。
BlueOSとArduSubのアップデート、DVL拡張機能のインストール、DVLの設定や位置保持モードの活用方法について解説します。
ソフトウェアのセットアップを続行するには、BlueROV2 の電源を入れ、コンピューターに接続します。
BlueOS のアップデート
DVL には BlueOS 安定バージョン 1.1.1 以降が必要です。
BlueROV2 はソフトウェア更新を実行するために Wi-Fi にアクセスする必要があります。更新プロセスを続行する前に、強力でアクセス可能な Wi-Fi ネットワークがあるエリアにいることを確認してください。BlueOS を更新するには:
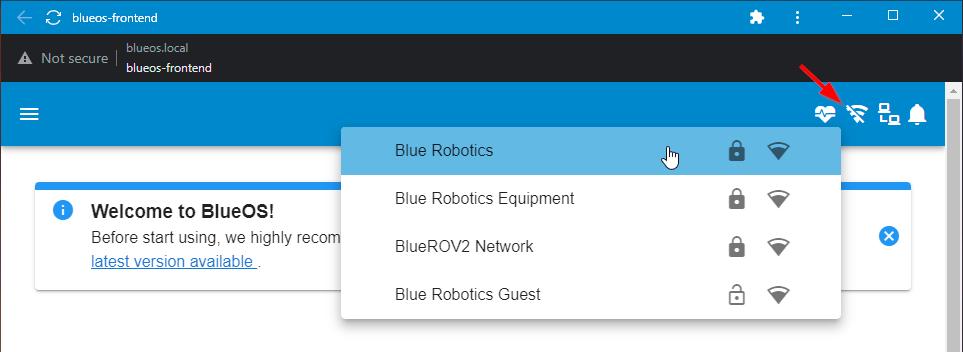
- ブラウザのアドレスバーにIP アドレス192.168.2.2またはhttps://blueos.localを入力して、BlueOS Web インターフェイスにアクセスします。
- ワイヤレス ネットワーク メニューから利用可能なネットワークをクリックし、パスワードを入力してワイヤレス ネットワークに接続します。
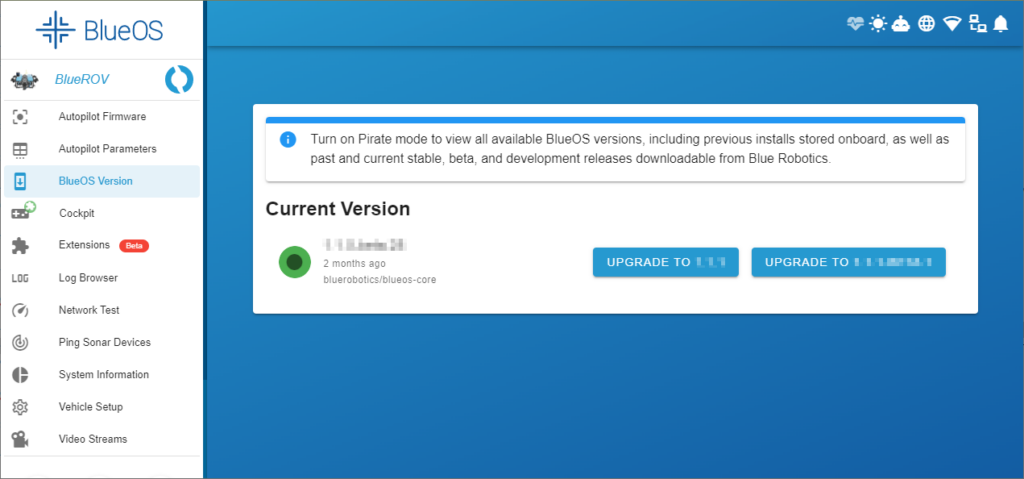
[ツール]サブメニューを展開し、[バージョン チューザー]を選択します (新しいベータ バージョンを使用している場合は、 BlueOS バージョンと呼ばれることがあります)。
新しい安定バージョンが利用可能な場合は、 [アップグレード]ボタンが表示されます。
更新を確認するには、インターネットに接続している必要もあります。
[アップグレード]をクリックして更新をインストールします。
ArduSub のアップデート
DVL には ArduSub 4.1.0 以降が必要です。
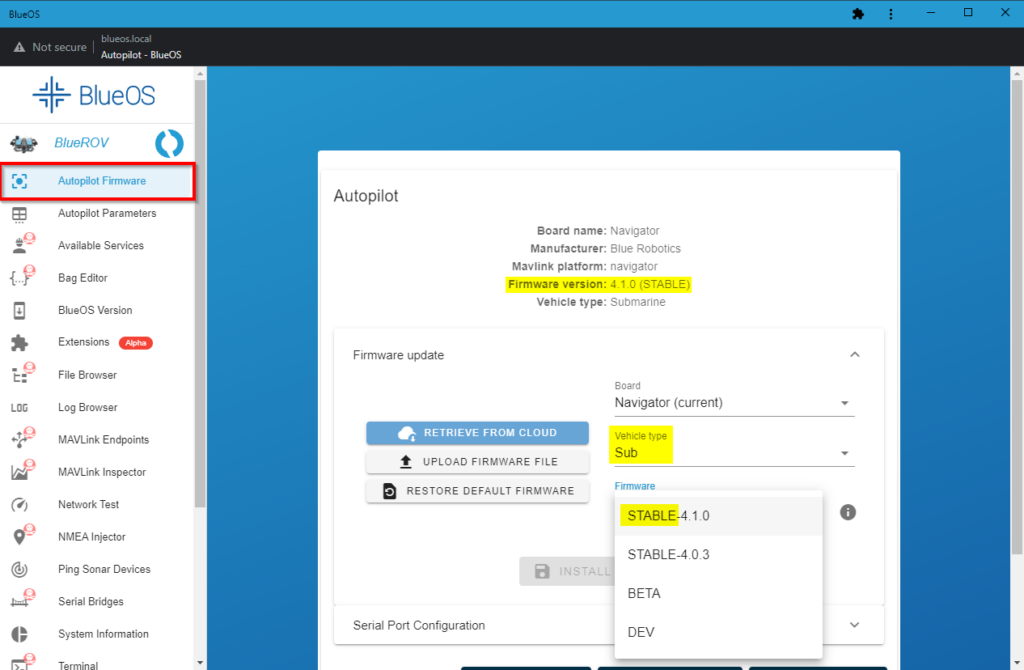
1.サイドバーからAutopilot Firmwareを選択します。現在インストールされているファームウェア バージョン (ArduSub バージョン) がページ上部に表示されます。
ファームウェアを更新するには、Firmware updateを展開し、 Vehicle typeドロップダウン メニューから「Sub」を選択し、 Firmwareドロップダウン メニューから最新の「STABLE」バージョンを選択します。INSTALL FIRMWARE を選択してインストールします。
最新の STABLE が現在インストールされているファームウェア バージョンと一致する場合は、これをスキップできます。
DVL拡張機能のインストール
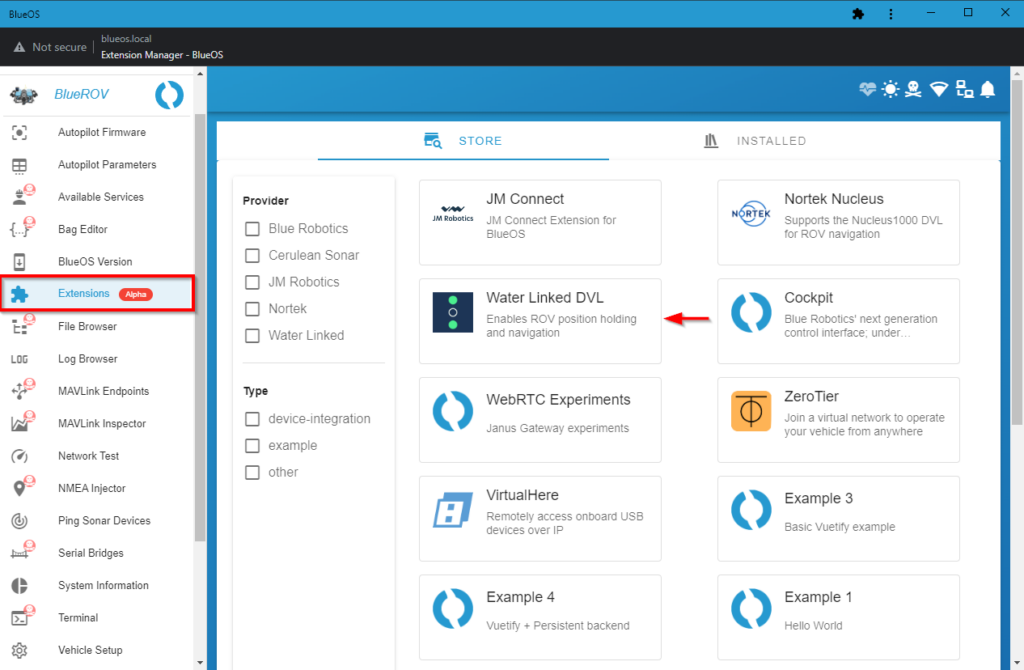
1. BlueOS サイドバーから拡張機能を選択します。Water Linked DVL拡張機能を見つけて選択し、「インストール」をクリックします。
DVL 拡張機能は、必要な車両パラメータを自動的に正しい設定に設定します。
これらのパラメータは参考用にのみ以下にリストされており、自分で設定する必要はありません。
| Parameter | Value |
| SERIAL0_PROTOCOL | MAVLink2 |
| EK3_ENABLE | Enabled |
| AHRS_EKF_TYPE | Enable EKF3 |
| EK2_ENABLE | Disabled |
| VISO_TYPE | MAVLink |
| EK3_SRC1_POSXY | ExternalNav |
| EK3_SRC1_VELXY | ExternalNav |
次の表は、DVL で使用するための推奨 PID 値を示しています。
ROV用にカスタム PID を調整して設定している場合は、必要に応じて独自の PID 値を引き続き使用できます。
それ以外の場合、その意味がわからない場合は、次のように PID を設定してください。
| Parameter | Value |
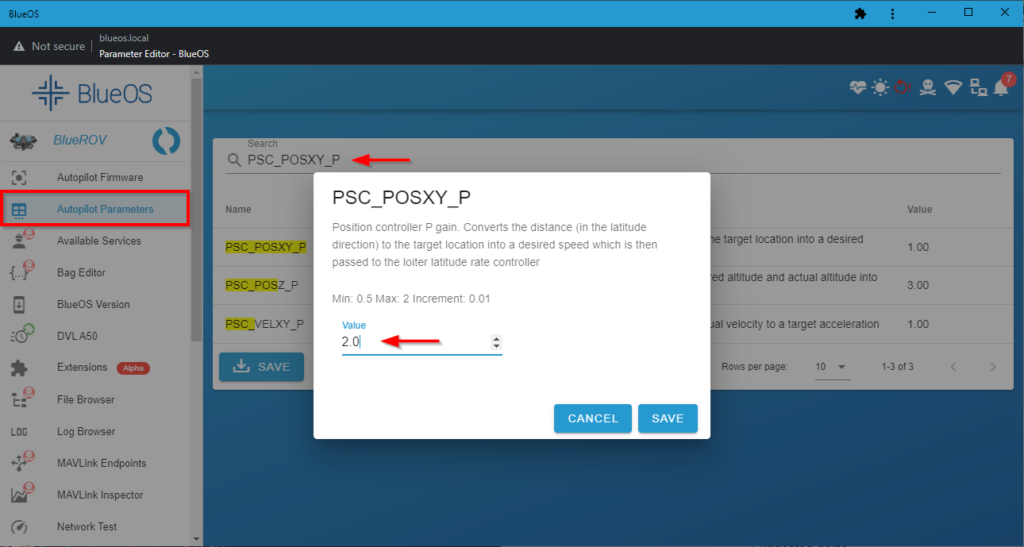
| PSC_POSXY_P | 2.0 |
| PSC_POSZ_P | 1.0 |
| PSC_VELXY_D | 0.8 |
| PSC_VELXY_I | 0.5 |
| PSC_VELXY_P | 5.0 |
| PSC_VELZ_P | 5.0 |
BlueOS サイドバーからAutopilot パラメータを選択します。パラメータ ページで、表のパラメータ名を検索バーに入力します。正しいパラメータを選択し、対応する値を値フィールドに入力します。[保存]をクリックして保存します。
マウント回転オフセットの設定
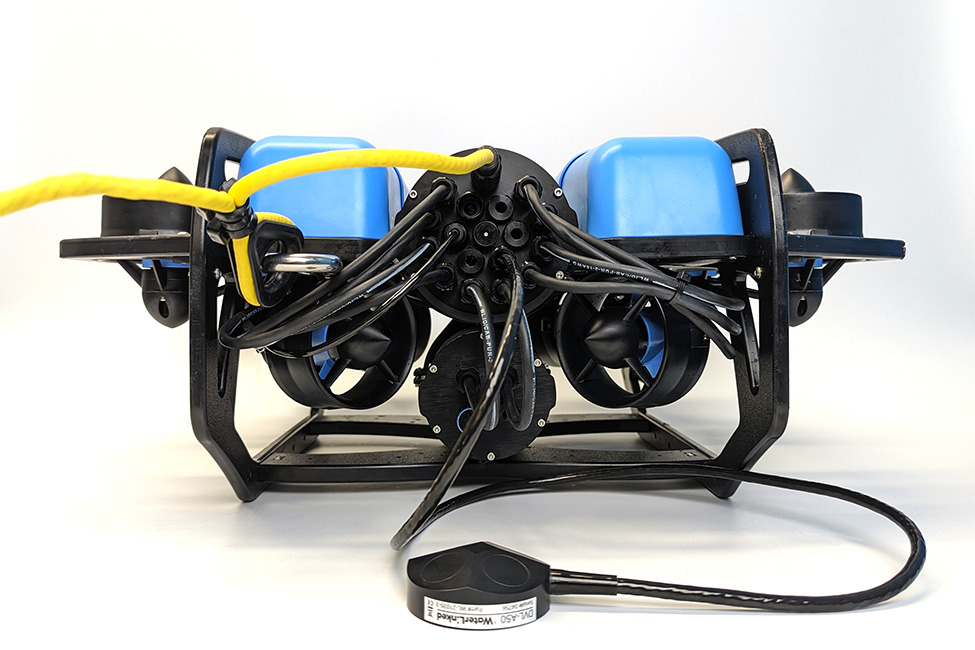
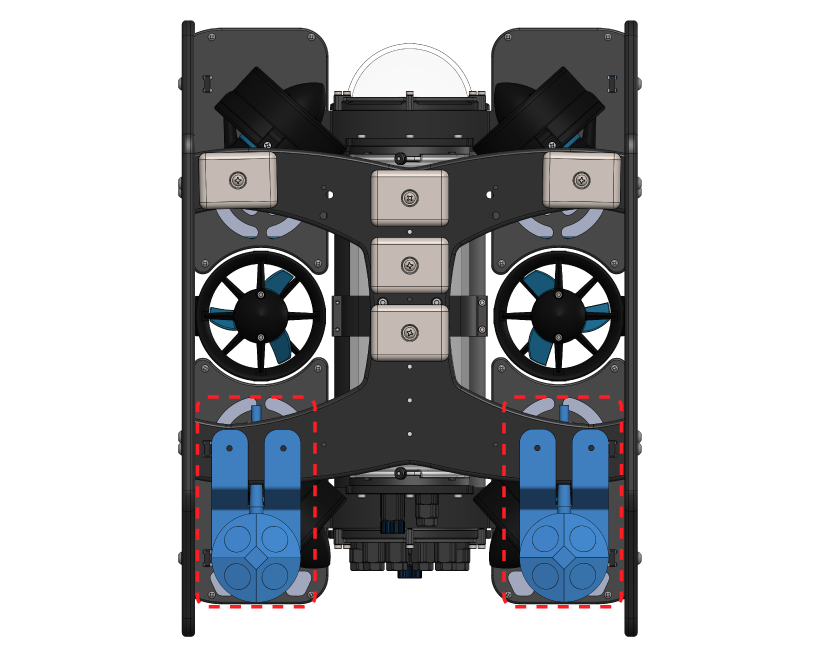
標準 BlueROV2 の推奨取り付け位置 (下図参照) を使用している場合、DVL は後ろ向きになっているため、DVL 設定で取り付け回転オフセットを修正する必要があります。
BlueROV2 Heavy Configuration のように DVL が前向きになっている場合は、この手順をスキップしてください。
1.ブラウザのアドレス バーにIP アドレス192.168.2.95 を入力して、Water Linked DVL Web GUI にアクセスします。
2. Water Linked DVL Web GUI で、左側のメニューを開き、「構成」を選択します。
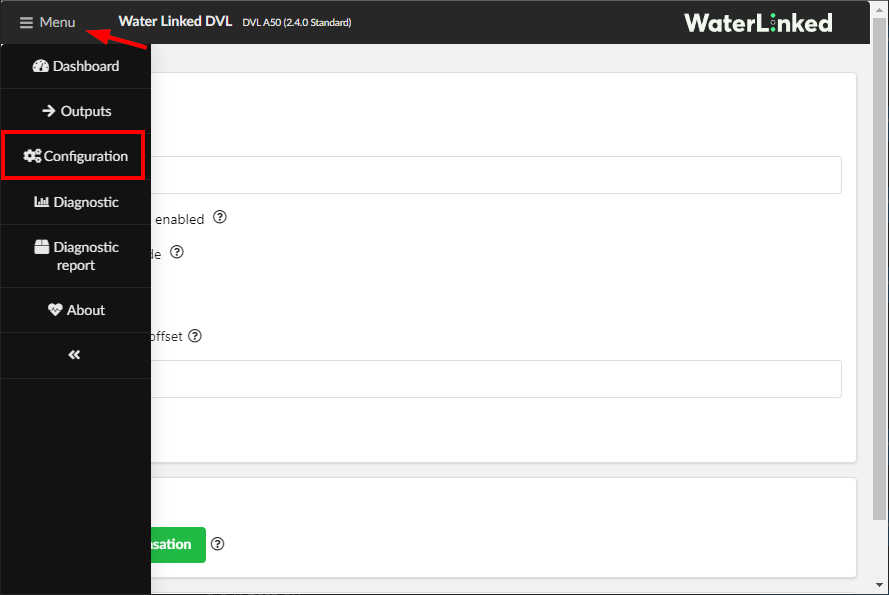
設定ページで、マウント回転オフセット設定に「180」または「0」と入力し、「Apply」をクリックして保存します。
弊社で搭載した機体はマウント回転オフセットを「0」にしてください。
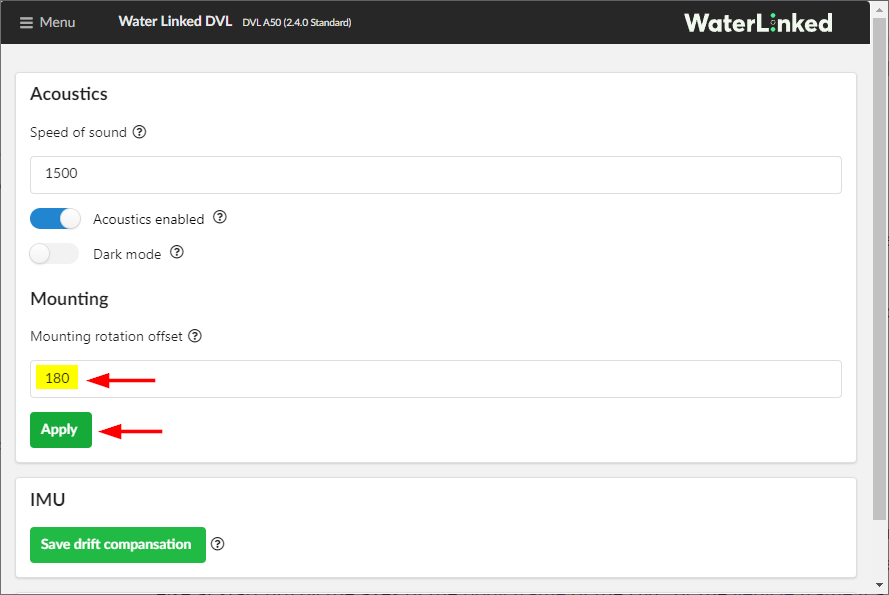
機体を水中に入れたら、一度「save drift compansation」をクリックして、補正を保存してください。
DVL A50とA125の使用
DVL により、BlueROV2 で 3 つの位置対応飛行モードが可能になります。
- 位置保持モード: ROVは移動命令が出されていないときは、方向、深度、位置を保持します。
- 自動モード: ROVは、ウェイポイントで構成された計画されたミッション パスに従います。
- ガイド モード (まだサポートされていませんが、近日中にサポート開始予定):ユーザーが地図上の場所をクリックすると、ROVが自律的にその場所に移動します。
また、QGroundControl マップ ビューで ROVの位置をライブで表示することもできます。次のセクションでは、各飛行モードの使用方法について詳しく説明します。
相対的位置と全体的位置
DVL は推測航法アルゴリズムを使用して方向と位置を推定します。
グローバル位置を決定するために GPS などの外部ソースは使用しません。代わりに、速度と動きを追跡して、最初の開始位置に対する現在の位置を推定します。
自動およびガイド付き飛行モードでは、ROVの開始位置座標は、WaterLinked DVL BlueOS 拡張機能のマップ上の場所をクリックすることで手動で設定できます。
ROVは、自動モードとガイド モードでのその後のウェイポイント ナビゲーションにこの開始位置を使用します。
ROVは計画されたウェイポイント ミッションに忠実に従いますが、実際の開始位置を基準に実行されるため、マップ上で選択した位置と正確に一致しない可能性があることに注意してください。
マップ上で ROVの正確なグローバル位置を取得するには、GPS や USBL などのグローバル ポジショニング システムが必要です。
位置保持モード
ポジション ホールド フライト モードは、標準の深度ホールド フライト モードや安定化フライト モードと同様に、コントローラーのボタンを押すことで有効になります。弊社で取付けた機体はコントローラーの緑ボタンに設定しています。
位置保持を有効にするために使用するボタンを選択し、QGroundControl でジョイスティックの設定から緑のボタンにmode_posholdを設定します。
操作中に、位置保持ボタンを押すと、位置保持飛行モードに切り替わります。位置保持を有効にすると、BlueROV2 は深度を保持し、方向を維持し、パイロットのコントローラー入力によって移動が指示されていないときは位置を保持します。





