
皆さんは”AUV’という言葉をご存知ですか?
地球に残された最後にして最大のフロンティアとも言われる深海の調査でも活躍している、自律航行型ロボットです。
海底資源の開発や通信ケーブルの敷設など、海洋調査のニーズが高まる中、AUVの技術も日々進化しています。
これからますます活躍の機会が増えそうなAUVの基礎知識を見ていきましょう!
AUVとは?
AUVは、あらかじめプログラムされたルートを無人で潜航し、海底付近の調査を行うロボットで、”Autonomous Underwater Vehicle’の略語です。「自律型潜水調査機器」と訳されることもあります。
無人ロボットは、人間が直接立ち入って活動することが困難な領域で真価を発揮します。
深海では、有人潜水艇や潜水艦を運用することも可能ではありますが、莫大なコストと人命のリスクを伴います。深海は無人かつ自律的に運用できるロボットの活躍が最も期待される領域の一つです。
同じく水中で活躍する無人ロボットとしてはROV(Remotely Operated Vehicle:有索式遠隔操縦型水中ロボット)がありますが、基本的な仕組みの違いによって区別されます。
-

-
BlueBoat|USV(水上ドローン)の販売と開発
弊社はBlueRoboticsの正規販売店です。BlueBoatの実証実験も数多く進めていますので、フルサポートでお手伝いできます。 実運用に基づく深い理解とトータルサポート 弊社は、小型無人ボートの ...
続きを見る
ROVとの違いは?
ROVは、陸上や母船のコンピューターとケーブルで接続し、オペレーターによる遠隔操作で航行します。目視で操作できる小型のものから、深海にも対応した大型のものまで、様々なタイプのROVが活躍中です。
対してAUVは、コンピューターと動力源(バッテリー)が内蔵されています。航行時にケーブルを必要としないのが最大の特徴です。海中の地形など、外界の状況も自動で判断して航行することができます。
ケーブルを必要としない分、一般的にROVと比べて低コストでの調査ができ、プログラムによっては、母船無しでの運用も可能です。
簡単に言えば、小回りの良さが持ち味のロボットと言えるでしょう。
ただし、潜航距離や航行時間はバッテリーの容量に左右され、異常が起きた際はただちに母船で回収する必要がある点に、十分留意しなければなりません。
AUVの種類
最初のAUVは、1959年、米国ワシントン大学の開発した機体だとされています。
以来、主に研究開発や軍用目的で、様々な種類の機体が開発されてきましたが、2010年頃からはコンピューターや画像処理などの性能向上を背景に、海底油田や海底ケーブルの管理といった商用利用が拡大しました。
需要の急増によって、多くのメーカーがAUV開発に参入し、バラエティに富んだ機体が続々と登場しています。
国土交通省の運用ガイドライン(2021年)によると、現行のAUVは、形状から主に5種類に分類されています。
(1) 航行型
海中での高速移動に対応し、多くは流線型をしています。有人潜水艇に似た形状のものから、細長い筒状のものまで、バリエーションは様々です。
広範囲での海底地形調査や、長距離のパイプラインなどの検査で活躍し、消費電力を抑えながら、高速で長距離を航行できることを目的に、工夫が凝らされています。
(2) ホバリング型
航行型よりも多くのスラスター(推進機)を備え、方向転換などの自由度が高いのが特徴です。
箱型の見た目をしているものも多く、長距離の高速移動というよりは、特定のポイントを詳細に調査することに適しています。
(3) グライダ型
グライダ型にはスラスターがありません。重心位置を変えることで上昇・下降を行い、無音で、消費電力を大幅に抑えられることが強みです。
航行型よりも長期間、広範囲での調査展開が可能で、海洋生物の調査や、数ヶ月から年単位での海洋環境調査での運用が期待されています。
(4) 生物模倣型
その名の通り、魚類などに見た目を似せて、環境に同化しながら調査を行うタイプです。プロペラ以外から推進力を得ます。
(5) クローラ型
車輪やキャタピラを備え、海底に着地して移動が可能です。ブルドーザーのような見た目をしています。
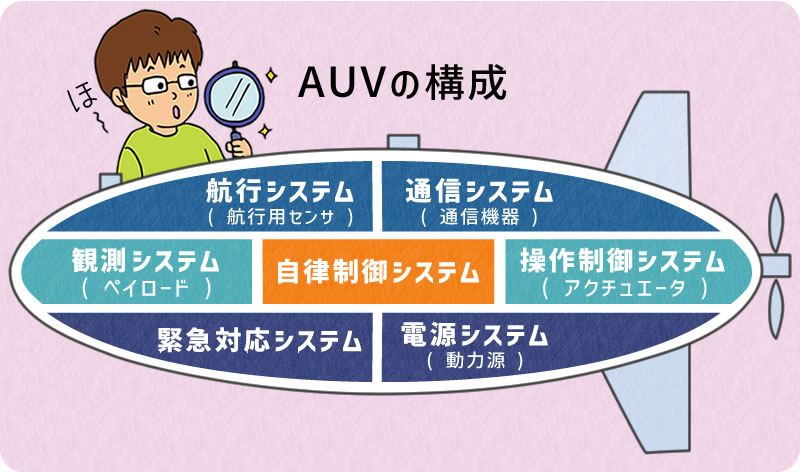
AUVの基本構成
AUVは用途によって様々な形状をしていますが、基本的な構成は、主に以下の7つの要素に整理されます。分類は前掲の国土交通省のガイドラインによるものです。
(1) 自立制御システム
一定の高度・深度で航行するための制御システムです。潮の流れなどの影響を受けやすい海中でも、重心位置を自動で調整しながら安定航行を行います。
(2) 緊急対応システム
AUVが万一、電源を喪失するなどして航行不能になった際、緊急浮上といった対応を行うためのシステムです。
(3) 航行システム
航行中のAUVの状態を正確に把握するためのシステムです。
(4) 電源システム
航行のための動力源です。リチウム電池などが用いられます。
(5) 通信システム
AUVの状態や航行目的(ミッション)の進捗、バッテリーの残量などを陸上(または水面上)の基地局と通信するためのシステムです。
(6) 操縦制御システム
航行目的に応じて、AUVを適切に操縦するためのものです。例えば、海底地形の測量が目的であれば、AUVの高度を一定に保つことが求められます。
(7) 観測システム
ミッションに応じた観測機器を搭載します。同じAUVでも、ペイロードに機器を載せ替えることで異なるミッションに運用することもできます。
AUVの活躍するフィールド
AUVの強みは、比較的低コストで、自由度の高い航行による調査を行える点です。
特に推進数千メートル級の深海での調査で、威力を発揮すると言われています。
深海の調査にはROVも多く活用されていますが、大規模なケーブルとそれらを収容する大型の母船が必須です。
一方AUVはケーブルを必要としないため、相対的にコストを抑えることができます。
すでに研究分野では、海底地形の調査などで多くの実績を有し、世界的な発見にも寄与してきました。
また、海底ケーブル網やパイプラインといった民間施設においても、長距離の航行が可能な特徴を活かして多数のAUVが運用されています。
今後は石油・ガス開発や洋上風力発電施設などでも活躍が期待され、国土交通省はそれぞれの用途に応じた運用ガイドラインを整備しました。
技術的な課題もありますが、世界のメーカー・研究機関により日々新たなAUVがリリースされており、近年の性能向上は目覚ましいものがあります。
ROVとともにさらなる進化と普及が見込まれるAUVの今後に、ますます注目です。
参考
編注:参考文献
海上保安庁「AUV」
https://www1.kaiho.mlit.go.jp/KIKAKU/JCG/ippankokai/HL11/Equipment_list/AUV.html
https://www.spf.org/opri/newsletter/91_2.html
国土交通省『AUVの安全運用ガイドライン』
https://www.mlit.go.jp/maritime/content/001409466.pdf
笹川平和財団 海洋政策研究所 『わが国のAUV開発とこれから』
https://www.spf.org/opri/newsletter/91_2.html





{kind=link}